Monitorowanie tablic rejestracyjnych
Streszczenie
Monitorowanie tablic rejestracyjnych to funkcja, która umożliwia kamerze rejestrowanie czytelnych obrazów tablic rejestracyjnych pojazdów. Jest ona używana w systemach rozpoznawania tablic rejestracyjnych, w których oprogramowanie analityczne automatycznie wykrywa i odczytuje tablice rejestracyjne na potrzeby takich zastosowań jak kontrola dostępu, zarządzanie parkowaniem czy pobór opłat za korzystanie z dróg.
Współczynnik detekcji i dokładność systemu rozpoznawania tablic rejestracyjnych zależy od jakości zarejestrowanych obrazów. Specjalistyczne kamery do monitorowania tablic rejestracyjnych są dostarczane z ustawieniami domyślnymi dobranymi pod kątem optymalnego monitorowania tablic rejestracyjnych, co minimalizuje potrzebę zmiany ich konfiguracji. W przypadku tych specjalistycznych kamer aspekty takie jak filtrowanie szumów i obsługa wzmocnienia, automatyczne ustawianie ostrości czy przełączanie między trybem dziennym i nocnym poddano ponownej ocenie oraz przetestowano w rzeczywistych warunkach monitorowania ruchu drogowego na wolnym powietrzu. Monitorowanie tablic rejestracyjnych wymaga innych ustawień kamery niż większość innych zastosowań, więc użycie dedykowanej kamery do monitorowania tablic pozwala zaoszczędzić sporo czasu i energii.
Jednym z kluczowych elementów jakości obrazu jest wysoka rozdzielczość. W przypadku monitorowania tablic rejestracyjnych rozdzielczość powinna być na tyle wysoka, by umożliwić odwzorowanie pojedynczych liter i cyfr — najmniejszy element wymagający odwzorowania powinien mieć grubość co najmniej dwóch pikseli — ale nie zbyt wysoka, aby ilość danych obrazu nie spowalniała analiz wykonywanych przez oprogramowanie. Zwłaszcza w przypadku, gdy oprogramowanie do rozpoznawania tablic rejestracyjnych działa bezpośrednio w kamerze, rozdzielczość zazwyczaj nie powinna przekraczać 2 MP.
Jeśli nie jest używana specjalistyczna kamera do monitorowania tablic rejestracyjnych, należy zwrócić szczególną uwagę na oświetlenie, instalację i ustawienia kamery. Oto kilka najważniejszych zaleceń:
W nocy należy używać oświetlenia sztucznego (czyli promieniowania IR). Jest ono niewidzialne dla człowieka i nie oślepia kierowców.
Jeśli trzeba skorzystać z zewnętrznego źródła światła, należy je umieścić możliwie najbliżej kamery. Wynika to z faktu, że tablice rejestracyjne odbijają światło z powrotem do źródła jego pochodzenia. Kamery Axis do monitorowania tablic rejestracyjnych mają wbudowane, zoptymalizowane źródło promieniowania IR.
Należy zminimalizować kąt między kamerą i kierunkiem przemieszczania się samochodów, aby tablice rejestracyjne znajdowały się na wprost kamery. Zaleca się, aby kąt całkowity był mniejszy niż 30°.
Kamerę należy umieścić tak, aby monitorowała tablice rejestracyjne z odległości odpowiedniej dla spodziewanej prędkości samochodów. Większa prędkość wymaga większej odległości monitorowania, ponieważ w przeciwnym razie system może nie zdążyć z odczytem tablicy, zanim samochód znajdzie się poza polem widzenia. Należy także uwzględnić ograniczenia wynikające z głębi ostrości kamery i zasięgu promieniowania IR.
Należy ograniczyć maksymalny czas migawki, aby uniknąć rozmycia obrazu spowodowanego ruchem. Zalecany czas migawki zależy od wyrównania kamery i prędkości pojazdów.
Należy ograniczyć maksymalne wzmocnienie kamery, aby uniknąć nadmiernej ekspozycji tablic rejestracyjnych w nocy.
Wprowadzenie
Monitorowanie tablic rejestracyjnych to funkcja, która umożliwia kamerze rejestrowanie czytelnych obrazów tablic rejestracyjnych pojazdów. Jest ona niezbędna do rozpoznawania tablic rejestracyjnych, czyli procesu polegającego na automatycznym wykrywaniu i odczytywaniu tablic rejestracyjnych przez oprogramowanie do analiz.
Współczynnik detekcji i dokładność systemu rozpoznawania tablic rejestracyjnych w wysokim stopniu zależy od jakości zarejestrowanych obrazów. Kamera do monitorowania tablic rejestracyjnych — pierwszy element w całym procesie — powinna dostarczać obrazy tablic o niemal idealnej ostrości i kontraście zarówno w dzień, jak i w nocy oraz w różnych warunkach pogodowych.
W tym dokumencie omówiono najważniejsze aspekty monitorowania tablic rejestracyjnych, jeśli chodzi o wybór sprzętu, instalację i konfigurację. W części 3 przedstawiono specjalistyczne kamery Axis do monitorowania tablic rejestracyjnych, które zapewniają znakomitą jakość obrazu oraz upraszczają instalację i konfigurację. W częściach 5, 6 i 7 wymieniono czynności niezbędne do pozyskiwania obrazów tablic rejestracyjnych przy użyciu dowolnej kamery Axis.
Informacje podstawowe
Rozpoznawanie tablic rejestracyjnych ma wiele zastosowań, takich jak kontrola dostępu, zarządzanie parkowaniem czy pobór opłat za korzystanie z dróg.
Technologia rozpoznawania tablic rejestracyjnych jest dostępna w różnych formach już od lat 70. XX wieku, jednak do niedawna ograniczała się do dużych i drogich systemów. Dynamiczny rozwój kamer sieciowych sprawia, że systemy rozpoznawania tablic rejestracyjnych tanieją i stają się bardziej elastyczne, co poszerza zakres ich zastosowań.
W branży funkcjonuje wiele nazw i akronimów oznaczających systemy rozpoznawania tablic rejestracyjnych: ALPR (automatic license plate recognition — automatyczne rozpoznawanie tablic rejestracyjnych), ANPR (automatic number plate recognition — automatyczne rozpoznawanie tablic z numerami rejestracyjnymi), AVI (automatic vehicle identification — automatyczna identyfikacja pojazdów), VLPR (vehicle license plate recognition — rozpoznawanie tablic rejestracyjnych pojazdów), VRI (vehicle recognition identifier — rozpoznawanie i identyfikacja pojazdów), CPR (car plate recognition — rozpoznawanie tablic pojazdów), CPR (car plate reader — odczyt tablic pojazdów) itd.
- Monitorowanie tablic rejestracyjnych
- Algorytm programowy
- Baza danych lub działanie
System rozpoznawania tablic rejestracyjnych składa się z jednej lub wielu kamer, które przechwytują obrazy tablic rejestracyjnych. Obrazy te są przetwarzane przez oprogramowanie do analizy tablic rejestracyjnych, które działa bezpośrednio w kamerze lub na serwerze zdalnym. Oprogramowanie do rozpoznawania tablic rejestracyjnych automatycznie wykrywa i odczytuje tablice w czasie rzeczywistym. Wykryte numery tablic rejestracyjnych mogą być zapisywane w bazie danych do wykorzystania w przyszłości lub używane do wyzwalania działań, takich jak otwarcie bramy.
W sytuacji idealnej system rozpoznawania tablic rejestracyjnych powinien wykrywać tablice wszystkich przejeżdżających pojazdów i prawidłowo je odczytywać. Kluczowe znaczenie dla wysokiego współczynnika detekcji i dużej dokładności ma jakość obrazu oferowana przez kamerę. Nawet najbardziej zaawansowany algorytm nie odczyta numeru rejestracyjnego z obrazu, na którym tablica nie jest dobrze widoczna.
Aby umożliwić skuteczną detekcję tablic rejestracyjnych, kamera musi być ustawiona i wyrównana w określony sposób. Ponadto w przypadku monitorowania tablic rejestracyjnych wymagane są inne ustawienia kamery niż w większości innych zastosowań. Domyślne ustawienia kamery ogólnego przeznaczenia nie nadają się do monitorowania tablic rejestracyjnych i dlatego trzeba zmienić konfigurację kamery. Wszystko to sprawia że instalacja jest dość uciążliwa — chyba że klient zastosuje dedykowaną kamerę do monitorowania/rozpoznawania tablic rejestracyjnych.
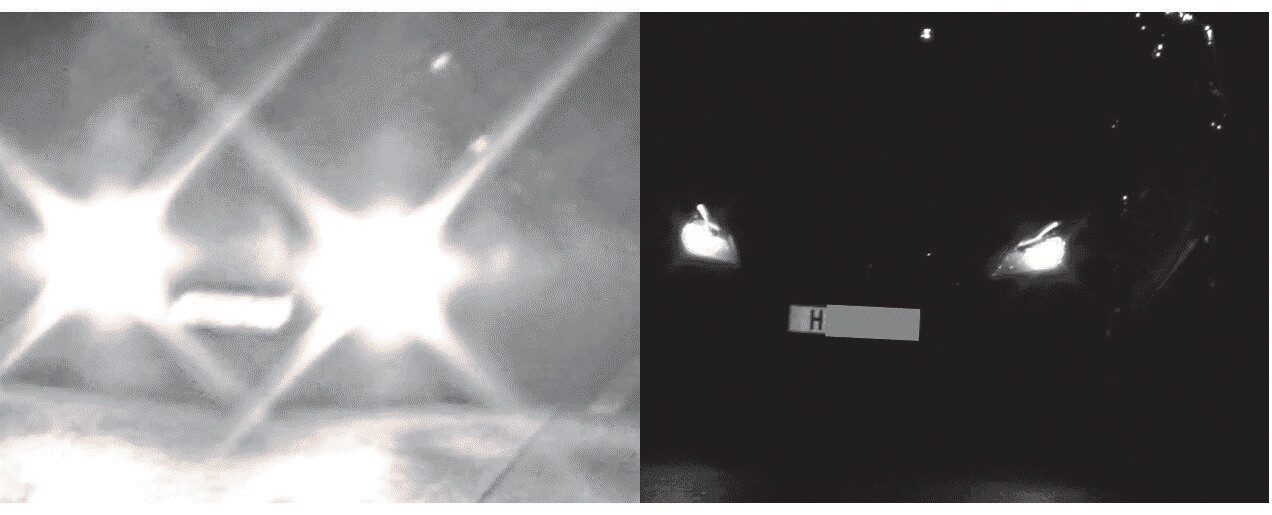
- Po lewej: obraz z niewłaściwie skonfigurowanej kamery
- Po prawej: obraz z dedykowanej kamery Axis do monitorowania/rozpoznawania tablic rejestracyjnych
Kamery Axis do monitorowania/rozpoznawania tablic rejestracyjnych
Dedykowane kamery Axis do monitorowania/rozpoznawania tablic rejestracyjnych są projektowane z uwzględnieniem trudnych warunków pracy w środowisku ruchu drogowego. Ich elementy są specjalnie dobierane pod kątem odporności na złe warunki pogodowe, silny wiatr i wahania temperatury. Wbudowane promieniowanie IR ma specjalnie dobrane natężenie i kierunek, aby zapewnić wysoki kontrast obrazów tablic rejestracyjnych w nocy.
W kamerach Axis do monitorowania/rozpoznawania tablic rejestracyjnych optymalizacja obrazu nie ogranicza się do ustawień czasu migawki i wzmocnienia. W urządzeniach tych część zasadniczych procesów obróbki obrazu została specjalnie przekonfigurowana pod kątem monitorowania tablic rejestracyjnych. Aspekty takie jak filtrowanie szumów i obsługa wzmocnienia, automatyczne ustawianie ostrości czy przełączanie między trybem dziennym i nocnym poddano ponownej ocenie oraz przetestowano w rzeczywistych warunkach monitorowania ruchu drogowego na wolnym powietrzu.
Domyślne ustawienia kamer Axis do monitorowania/rozpoznawania tablic rejestracyjnych wybiera się tak, aby zoptymalizować monitorowanie tablic i zminimalizować ilość czynności konfiguracyjnych niezbędnych do rozpoczęcia pracy.
Asystent instalacji kamery ulicznej
Asystent instalacji kamery ulicznej to opracowana przez Axis funkcja, która ułatwia prawidłowe wyrównanie i skonfigurowanie kamery.
Podczas wyrównywania kamery asystent instalacji kamery ulicznej automatycznie przekazuje informacje zwrotne. Jest to możliwe, ponieważ kamera potrafi zmierzyć swoją orientację w polu grawitacyjnym. Asystent na bieżąco pokazuje kąty kamery w pionie i poziomie oraz kąt jej przechylenia, a jeśli ich wartości są zbyt duże, wyświetla ostrzeżenie. Ponadto asystent oblicza odległość monitorowania w czasie rzeczywistym, czyli krytyczny parametr, który trudno oszacować wzrokowo.
Po pomyślnym wyrównaniu kamera oblicza odpowiednie ustawienia dla danej sceny i swojego modelu. Kliknięcie przycisku stosowania ustawień powoduje aktywowanie konfiguracji i zoptymalizowanie kamery pod kątem monitorowania tablic rejestracyjnych.
Gęstość pikseli
Aby numer nadawał się do odczytu, tablica rejestracyjna powinna zajmować dostateczną liczbę pikseli na przetworniku obrazu, pozwalającą odwzorować poszczególne litery i cyfry. Aby czarne linie i białe przestrzenie maksymalnie ze sobą kontrastowały, najmniejszy element wymagający odwzorowania na obrazie powinien mieć grubość co najmniej dwóch pikseli. W przypadku standardowej europejskiej tablicy rejestracyjnej oznacza to, że aby można było odwzorować poszczególne linie, pełna szerokość tablicy wymaga 74 pikseli na przetworniku obrazu. Jest to bezwzględne minimum do dobrego odwzorowania numeru, natomiast większość programów do rozpoznawania tablic rejestracyjnych wymaga, aby pełna szerokość tablicy zajmowała około 100–150 pikseli.
Wysoka rozdzielczość ma ten minus, że oprogramowanie do rozpoznawania tablic rejestracyjnych potrzebuje dużo czasu na przeanalizowanie każdego obrazu. Zwiększa to ryzyko pominięcia niektórych tablic przy dużym natężeniu ruchu. Jeśli oprogramowanie do rozpoznawania tablic rejestracyjnych działa bezpośrednio w kamerze, zalecamy korzystanie z rozdzielczości maksimum 2 MP. Warto rozważyć użycie kilku kamer w celu pokrycia większej liczby pasów ruchu. Należy także sprawdzić zalecaną rozdzielczość podaną w instrukcji oprogramowania do rozpoznawania tablic rejestracyjnych.
| Rozdzielczość minimalna | |
|---|---|
| 1 pas ruchu, szerokość < 4 m (ok. 13 stóp) | 1 MP (HD, 720p) |
| 2 pasy ruchu, szerokość < 8 m (ok. 25 stóp) | 2 MP (Full HD, 1080p) |
Z perspektywy kamery liczba pikseli na szerokości tablicy rejestracyjnej zależy od rozdzielczości przetwornika obrazu i pola widzenia.
Obiektyw zmiennoogniskowy umożliwia przybliżanie i oddalanie, dając swobodę wyboru pola widzenia w ramach określonej sceny.

- Po lewej: zbliżenie na jeden pas ruchu (4 m szerokości). Tablica rejestracyjna zajmuje 250 pikseli.
- Po prawej: oddalenie pozwalające objąć prawie dwa pasy ruchu (6,5 m szerokości). Tablica rejestracyjna zajmuje 154 piksele.
| Odległość monitorowania: | |||||
|---|---|---|---|---|---|
| 5 m (ok. 16 stóp) | 10 m (ok. 33 stóp) | 20 m (ok. 66 stóp) | 30 m (ok. 98 stóp) | 50 m (ok. 164 stóp) | |
| 1 pas ruchu < 4 m (ok. 13 stóp) | 33°–44° | 17°–23° | 9°–11° | 6°–8° | 3°–6° |
| 2 pasy ruchu < 8 m (ok. 25 stóp) | 62°–77° | 33°–44° | 17°–23° | 11°–15° | 7°–9° |
Promieniowanie IR
Do monitorowania tablic rejestracyjnych w nocy potrzebne jest oświetlenie sztuczne. Zazwyczaj w tym celu używa się promieniowania podczerwonego (IR), ponieważ jest ono niewidzialne dla człowieka i nie oślepia kierowców. Większość tablic rejestracyjnych odbija promienie IR i promieniowanie podczerwone zwiększa widoczność oraz kontrast tablic w ciemności lub przy zachmurzeniu. Promieniowanie IR może pochodzić z diod LED wbudowanych w kamerę lub ze źródeł zewnętrznych.
Zasięg promieniowania IR
Natężenie promieniowania świetlnego zmniejsza się proporcjonalnie do kwadratu odległości od źródła promieniowania. W przypadku obiektu odblaskowego, takiego jak tablica rejestracyjna, oznacza to, że jeśli podwoimy odległość między źródłem promieniowania i obiektem, w celu zachowania tej samej widoczności obiektu musimy czterokrotnie zwiększyć moc promieniowania IR.
Maksymalna możliwa odległość monitorowania w danej konfiguracji zależy od dostępnej mocy promieniowania IR, kąta promieniowania i światłoczułości kamery. Technologia Axis OptimizedIR optymalizuje kąt promieniowania IR emitowanego przez wbudowane w kamerę diody LED przy każdym poziomie zbliżenia. Technologia Axis Lightfinder maksymalizuje zasięg wbudowanych diod LED IR oraz ogranicza potrzebę stosowania zewnętrznych źródeł promieniowania IR i dodatkowych zasilaczy.
Ze względu na krótkie czasy migawki wymagane podczas monitorowania tablic rejestracyjnych do kamery dociera mniej światła niż przy ustawieniach domyślnych. Jednak wysoki stopień odbijania promieniowania IR przez tablice rejestracyjne skutkuje wzrostem ich jasności. Ogólnie rzecz biorąc, określony zasięg promieniowania IR spada o około 50%, jeśli kamera jest używana do monitorowania tablic rejestracyjnych (przy czasie migawki równym 1/500 s). Nie dotyczy to specjalistycznych kamer do monitorowania tablic rejestracyjnych, które standardowo udostępniają krótki czas ekspozycji i odpowiednie specyfikacje.
W przypadku kamer Axis ogólnego przeznaczenia zasięg promieniowania IR podany w karcie danych technicznych dotyczy domyślnych ustawień kamery (maksymalny czas migawki to zazwyczaj 1/30 s) i obiektów nieodblaskowych. W przypadku kamer Axis do monitorowania tablic rejestracyjnych zasięg promieniowania IR podany w karcie danych technicznych dotyczy domyślnych ustawień kamery do monitorowania tablic (maksymalny czas migawki to zazwyczaj 1/500 s lub mniej) i odblaskowych tablic rejestracyjnych.
Zewnętrzne źródła promieniowania IR
Jeśli zasięg promieniowania IR z wbudowanych diod LED IR jest niewystarczający lub kamera nie ma wbudowanych diod LED IR, można skorzystać z zewnętrznych źródeł promieniowania IR. Stożek promieniowania IR z takiego źródła powinien być zgodny z polem widzenia kamery przy odpowiednim poziomie zbliżenia.
Tablice rejestracyjne są wykonane z materiału odblaskowego, co oznacza, że odbijają światło z powrotem do źródła jego pochodzenia, niezależnie od kąta padania promieni na tablicę. Również w przypadku korzystania z zewnętrznego źródła promieniowania IR odbite promienie IR wracają do źródła.
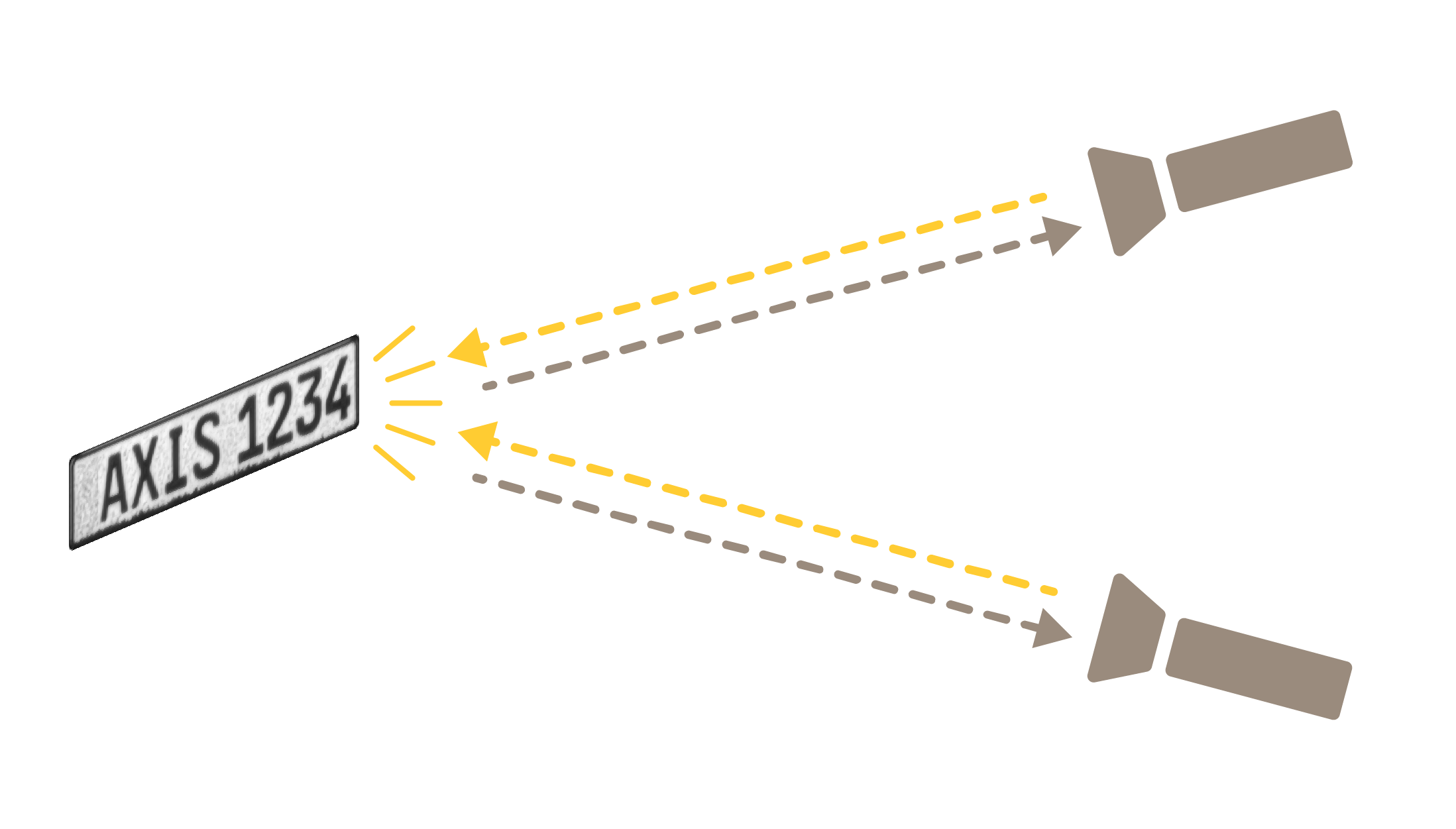
Z tego względu zewnętrzne źródło promieniowania IR musi znajdować się blisko kamery, aby odbite promieniowanie rzeczywiście do niej dotarło. Zwiększanie odległości między źródłem promieniowania IR a kamerą powoduje szybki spadek jasności i kontrastu tablicy rejestracyjnej na obrazie z kamery.
Źródło promieniowania IR powinno być ustawione równolegle do kamery, aby promienie padały na część drogi znajdującą się w jej polu widzenia.
Instalacja
Instalacja kamery często ma krytyczne znaczenie, ponieważ jej późniejsza modyfikacja bywa trudna. Dlatego przed przystąpieniem do montażu kamery warto poświęcić nieco czasu na zapoznanie się ze współzależnościami różnych parametrów.
Asystent instalacji kamery ulicznej Axis to narzędzie, które powstało z myślą o ułatwieniu instalacji, wyrównywania i precyzyjnego dostrajania w konkretnych warunkach eksploatacyjnych. Pomaga ono w instalacji, wyświetlając odpowiednie kąty i odległości w czasie rzeczywistym oraz ostrzegając o nieoptymalnym wyrównaniu kamery.
Umiejscowienie kamery
- Wysokość montażowa
- Odległość monitorowania
- Kąt w pionie między kamerą i kierunkiem jazdy
- Odległość od środka pasa ruchu
- Kąt w poziomie między kamerą i kierunkiem jazdy
Należy dążyć do zminimalizowania kąta między kamerą i kierunkiem przemieszczania się samochodów, aby tablice rejestracyjne znajdowały się mniej więcej na wprost kamery. Najlepiej, aby kamera była umiejscowiona bezpośrednio nad pojazdami i na niezbyt dużej wysokości. Z drugiej strony warto zamontować kamerę wyżej niż reflektory samochodów, aby nie „oślepiały” jej silne światła.
Należy również unikać umieszczania kamery w pobliżu innych silnych źródeł światła, takich jak latarnie uliczne. W przeciwnym razie światło z tych źródeł może zakłócać działanie funkcji automatycznej ekspozycji oraz powodować odblaski i refleksy w elementach optycznych.
Tabele z obliczonymi wartościami kąta między kamerą i samochodem dla typowych wysokości montażu, odległości od pasa ruchu i odległości monitorowania znajdują się w sekcji Kąt między kamerą i samochodem.
Wyrównanie kamery
Kamera powinna być skierowana na drogę w taki sposób, aby na obrazie odpowiednie pasy ruchu były wyśrodkowane. Poziom zbliżenia powinien być dobrany tak, aby zapewnić pokrycie wymaganej liczby pasów ruchu, ale bez zbędnego nadmiaru. Kąt przechylenia kamery należy ustawić tak, aby tablice rejestracyjne były równoległe do krawędzi obrazu.

Odległość między kamerą i monitorowanym przez nią odcinkiem drogi nazywa się odległością monitorowania. Odległość tę należy wybierać z rozwagą, ponieważ na kilka sposobów wpływa ona na skuteczność detekcji tablic rejestracyjnych. W pozostałej części tego rozdziału omówimy różne parametry wpływające na wybór odległości monitorowania.
Głębia ostrości
- kamery
- Odległość monitorowania, czyli ogniskowa
- Płaszczyzna ostrości
- Głębia ostrości
Kamera wymaga dobrego ustawienia ostrości, aby tablice rejestracyjne były ostre i czytelne. Trzeba jednak pamiętać, że obraz jest ostry nie tylko w jednej, określonej odległości od kamery, ale w pewnym zakresie odległości wokół płaszczyzny ostrości. Rozmiar tego zakresu jest nazywany głębią ostrości.
Głębię ostrości można zwiększyć przez zmniejszenie otworu przysłony. W kamerach Axis ustawienie przysłony jest automatycznie optymalizowane dla bieżącego poziomu oświetlenia i zazwyczaj nie trzeba go zmieniać. W przypadku zmniejszania otworu przysłony należy zachować ostrożność, ponieważ negatywnie wpływa ono na działanie kamery w słabym oświetleniu.
Zakres detekcji
- kamery
- Odległość monitorowania (ogniskowa)
- Kąt widzenia w pionie
Zakres detekcji oznacza przedział odległości wzdłuż drogi, w którym tablica rejestracyjna jest widoczna i możliwa do odczytania na obrazie. W idealnych warunkach zakres detekcji pokrywa się z pełnym polem widzenia kamery, ale w rzeczywistości nie zawsze tak jest. Zakres detekcji może być ograniczony przez głębię ostrości kamery, a oddalone pojazdy czasem są zbyt małe, by przetwornik obrazu mógł je odwzorować z wystarczającą rozdzielczością.
Takie zjawiska pogodowe jak opady śniegu lub deszczu czy mgła mogą znacznie ograniczyć widoczność przy dużych odległościach monitorowania, tym samym ograniczając zakres detekcji.
W dzień i przy dobrej pogodzie zakres detekcji zwiększa się wraz z odległością monitorowania. W przypadku pojazdów poruszających się z dużą prędkością należy używać dużej odległości monitorowania, aby zapewnić wystarczająco długi czas na odczyt tablicy rejestracyjnej, zanim samochód opuści pole widzenia kamery.
Zalecana odległość monitorowania
| Prędkość samochodu | Zalecana minimalna odległość monitorowania |
|---|---|
| 10 km/h (ok. 6 mil/h) | 4 m (ok. 13 stóp) |
| 30 km/h (ok. 19 mil/h) | 7 m (ok. 23 stóp) |
| 50 km/h (ok. 31 mil/h) | 11 m (ok. 36 stóp) |
| 80 km/h (ok. 50 mil/h) | 24 m (ok. 79 stóp) |
| 100 km/h (ok. 62 mil/h) | 27 m (ok. 89 stóp) |
| 130 km/h (ok. 81 mil/h) | 30 m (ok. 98 stóp) |
Zalecana minimalna odległość monitorowania zależy od prędkości pojazdów. Liczby podane w tabeli opierają się na szacunkowym czasie detekcji wynoszącym 0,2 s, co oznacza, że oprogramowanie do rozpoznawania tablic rejestracyjnych jest w stanie przeanalizować pięć klatek na sekundę. Należy pamiętać, że liczba przeanalizowanych klatek na sekundę może być różna w zależności od oprogramowania do rozpoznawania tablic rejestracyjnych i od procesora, a ponadto zależy od rozdzielczości obrazów. W tabeli podano jedynie wartości orientacyjne.
W nocy maksymalna możliwa odległość monitorowania często jest ograniczona przez zasięg promieniowania IR. Można go zwiększyć przez użycie zewnętrznych źródeł IR o wyższej mocy.
Ustawienia kamery
Ustawienia kamery mają naprawdę duże znaczenie, jeśli chodzi o skuteczność monitorowania tablic rejestracyjnych. Specjalistyczne kamery do monitorowania tablic są dostarczane z odpowiednimi ustawieniami domyślnymi i niemal nie wymagają dostrajania. W przypadku innych kamer może wystąpić potrzeba zmiany niektórych ustawień.
Profil sceny do monitorowania tablic rejestracyjnych
Niektóre kamery Axis udostępniają profil sceny przeznaczony specjalnie do monitorowania tablic rejestracyjnych. Po aktywowaniu tego profilu kamera korzysta z ustawień obrazu zoptymalizowanych pod kątem rozpoznawania tablic rejestracyjnych, które zostały opracowane, przetestowane i zweryfikowane przez Axis. Ustawienia są zoptymalizowane dla każdego trybu kamery i czasami obejmują zmiany algorytmów, którymi nie można sterować za pomocą zwykłych parametrów użytkownika. Profil sceny może na przykład:
Ustawiać maksymalny czas migawki i maksymalne wzmocnienie.
Wyłączać funkcję WDR lub przełączać kamerę na technikę WDR niepowodującą generowania artefaktów związanych z ruchem, jeśli jest ona dostępna w danym modelu kamery.
Dostosowywać mapowanie tonów i kontrast w sposób odpowiedni dla rozpoznawania tablic rejestracyjnych.
Używać warunków przełączania dzień/noc bardziej odpowiednich dla scenariusza z ruchem drogowym.
Asystent instalacji kamery drogowej automatycznie ustawia odpowiedni profil sceny.
Jeśli kamera nie obsługuje profili scen lub nie zawiera profilu monitorowania tablic rejestracyjnych, należy ręcznie zmienić określone parametry obrazu. To może być trudne, ponieważ optymalne parametry obrazu zależą od modelu kamery, warunków montażu i sceny.
Maksymalny czas migawki
Jeśli czas migawki kamery będzie zbyt długi, na rejestrowanych przez nią obrazach pojazdów pojawią się rozmycia spowodowane ruchem. Maksymalny czas migawki zależy od wyrównania kamery i prędkości pojazdów.

Samochód, który zbliża się do kamery na wprost, nie porusza się w poprzek obrazu, a jedynie staje się coraz większy wraz ze spadkiem odległości. To zjawisko można pominąć. Jeśli jednak ruch odbywa się pod pewnym katem do kierunku ustawienia kamery, samochód przemieszcza się w poprzek obrazu z szybkością zależną od tego kąta. Przy normalnym czasie migawki wynoszącym około 1/30 s ten poprzeczny ruch powoduje rozmycie obrazu, dlatego należy ograniczyć maksymalny czas migawki.
W poniższej tabeli przedstawiono zalecany maksymalny czas migawki w zależności od kąta między kierunkiem ustawienia kamery a kierunkiem przemieszczana się pojazdów oraz w zależności od prędkości pojazdów. Kąt kamery można oszacować, posługując się tabelami zamieszczonymi w sekcji Kąt między kamerą i samochodem.
| Prędkość samochodu: | |||||
|---|---|---|---|---|---|
| 30 km/h (~19 mph) | 50 km/h (~31 mph) | 80 km/h (~50 mph) | 110 km/h (~68 mph) | 130 km/h (~81 mph) | |
| Kąt kamery | |||||
| 5° | 19,3 ms | 11,6 ms | 7,2 ms | 5,3 ms | 4,5 ms |
| 10º | 9,7 ms | 5,8 ms | 3,6 ms | 2,6 ms | 2,2 ms |
| 15° | 6,5 ms | 3,9 ms | 2,4 ms | 1,8 ms | 1,5 ms |
| 20° | 4,9 ms | 2,9 ms | 1,8 ms | 1,3 ms | 1,1 ms |
| 25° | 4,0 ms | 2,4 ms | 1,5 ms | 1,1 ms | 0,9 ms |
| 30° | 3,4 ms | 2,0 ms | 1,3 ms | 0,9 ms | 0,8 ms |
Warto zwrócić uwagę, że przy dłuższym czasie migawki kamera rejestruje więcej światła, co zwiększa zasięg promieniowania IR. Montując kamerę pod kątem 5° zamiast 20°, można wydłużyć czas migawki w przybliżeniu czterokrotnie. Spowoduje to podwojenie zasięgu promieniowania IR. Zasięg promieniowania IR podany w kartach danych technicznych kamer Axis dotyczy domyślnego maksymalnego czasu migawki kamery.
Maksymalne wzmocnienie
Ponieważ tablica rejestracyjna jest wykonana z materiału odblaskowego, wystawiona na silne promieniowanie IR intensywnie błyszczy. Otoczenie jest znacznie ciemniejsze, ponieważ inne obiekty odbijają znacznie mniej światła. Konsekwencją tego zjawiska może być nadmierna ekspozycja tablicy, która uniemożliwia jej odczyt.
Najprostszym sposobem na uniknięcie nadmiernej ekspozycji tablicy rejestracyjnej jest ograniczenie maksymalnego wzmocnienia kamery. Optymalna wartość maksymalnego wzmocnienia zależy od dostępnej intensywności promieniowania IR, odległości od pojazdów i światłoczułości kamery. W przypadku korzystania z wbudowanego promiennika IR kamery Axis dobre wyniki powinna dać wartość między 9 dB i 21 dB.
WDR
Funkcja szerokiego zakresu dynamiki (wide dynamic range — WDR) obejmuje różne techniki zwiększające zakres dynamiki tonalnej obrazu. WDR bardzo pomaga w wydobywaniu szczegółów z ciemnych partii obrazu oraz przeciwdziała „oślepianiu” kamery przez silne światło.
W zależności od sposobu zaimplementowania funkcji WDR w konkretnej kamerze może ona powodować powstawanie artefaktów na obrazach pojazdów w ruchu. Jeśli w specyfikacji kamery nie podano inaczej, zawsze zalecamy wyłączenie funkcji WDR na potrzeby monitorowania tablic rejestracyjnych.
Oprogramowanie do rozpoznawania tablic rejestracyjnych
Po zarejestrowaniu strumienia wideo z tablicami rejestracyjnymi potrzebne jest specjalne oprogramowanie analityczne, które wydobędzie z obrazów numery tablic. Wydajność systemu rozpoznawania tablic rejestracyjnych zależy nie tylko od ustawień kamer, ale także od konfiguracji oprogramowania rozpoznającego. Więcej informacji można znaleźć w instrukcji używanego oprogramowania.
Oprogramowanie do rozpoznawania tablic rejestracyjnych może działać bezpośrednio w kamerze lub na serwerze zdalnym.
Jeśli oprogramowanie do rozpoznawania tablic rejestracyjnych działa na serwerze zdalnym, może mieć do dyspozycji dużą moc obliczeniową, ale wymaga przesyłania materiału wizyjnego do lokalizacji zdalnej, a co za tym idzie — w większym stopniu obciąża przepustowość sieci. System serwerowy trudno jest rozbudować do obsługi wielu kamer, ponieważ duża liczba strumieni wideo szybko doprowadziłaby do zatkania sieci.
Gdy oprogramowanie do rozpoznawania tablic rejestracyjnych działa bezpośrednio w kamerze, z kamery na serwer centralny trzeba wysyłać jedynie litery i cyfry z tablic rejestracyjnych (choć dane wyjściowe często zawierają również zdjęcie tablicy i widok kontekstowy). Minimalizuje to zapotrzebowanie na przepustowość sieci. Taki rozproszony system jest łatwy w skalowaniu, ponieważ dodanie nowej kamery nie wiąże się z koniecznością dodania innych zasobów do systemu.
Wadą uruchamiania algorytmów rozpoznawania tablic rejestracyjnych w kamerze jest ograniczona moc obliczeniowa, która sprawia, że analiza każdego obrazu jest bardziej czasochłonna. Ogranicza to maksymalną możliwą rozdzielczość, a więc i liczbę pasów ruchu, które może monitorować jedna kamera. Rozwój nowych rodzajów funkcji analizy obrazu wykorzystujących sztuczną inteligencję i sieci neuronowe prowadzi do wzrostu wydajności kamer. Bardziej efektywne algorytmy i wydajniejsze wbudowane procesory skrócą czas analizy pojedynczego obrazu i zwiększą konkurencyjność systemów rozproszonych.
Dodatek
Filtry optyczne
W pewnych sytuacjach zastosowanie filtrów optycznych na drodze promieni światła do kamery może poprawić jakość obrazu. Jednak filtry te często blokują znaczną ilość promieniowania. Powoduje to gorsze działanie kamery w słabym oświetleniu i zwiększa ilość szumów na obrazie.
Filtr polaryzacyjny
Prawidłowo ustawiony filtr polaryzacyjny może ograniczyć odbicia światła od płaskich powierzchni, takich jak przednia szyba samochodu czy nawierzchnia drogi. Jednocześnie jednak blokuje 50% światła docierającego do kamery, co może istotnie wpłynąć na jakość obrazu. Poprawa widoczności tablic rejestracyjnych jest bardzo niewielka. Z tego powodu nie zalecamy używania filtru polaryzacyjnego do monitorowania tablic rejestracyjnych. Taki filtr może się jednak przydać do ogólnego dozoru ruchu drogowego, na przykład poprawiając widoczność wnętrza samochodu.
Filtr przepuszczający promieniowanie IR
Filtr przepuszczający promieniowanie IR blokuje światło widzialne, skutkiem czego do przetwornika obrazu dociera wyłącznie promieniowanie podczerwone. Ponieważ tablica rejestracyjna odbija znacznie więcej promieniowania IR niż otoczenie, obraz jest wówczas ciemniejszy i tylko tablica wyróżnia się jasnością, co ułatwia jej wykrycie algorytmom rozpoznawania tablic rejestracyjnych. W ten sposób można także polepszyć ustawianie ostrości w nocy.
Filtr może blokować światło pochodzące z reflektorów samochodów, zapobiegając powstawaniu odblasków i refleksów w obiektywie. Bardzo skutecznie odfiltrowuje on światło pochodzące z reflektorów LED. Natomiast reflektory halogenowe emitują dużo światła z zakresu fal podczerwonych, a skuteczność filtrowania tego promieniowania nie jest duża.
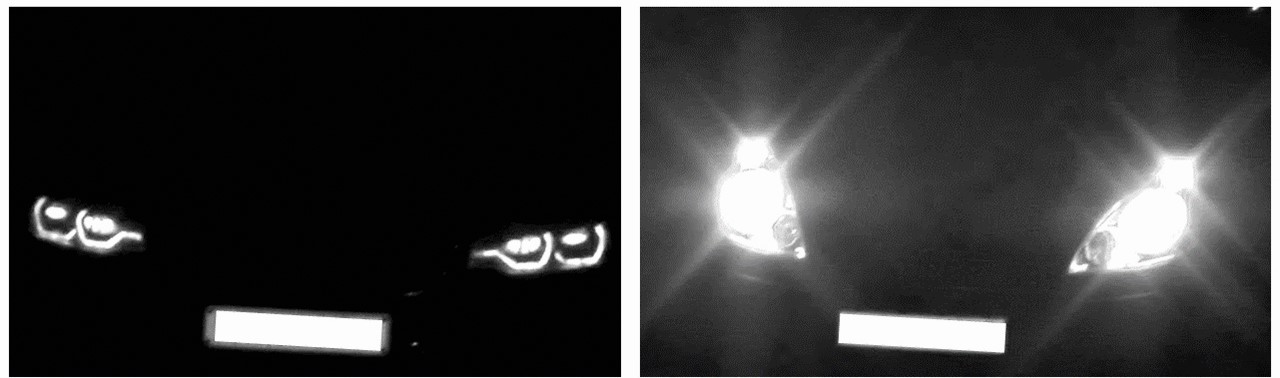
- Po lewej: filtr przepuszczający promieniowanie IR blokuje światło z reflektorów LED, skutecznie redukując odblaski i światło rozproszone.
- Po prawej: światło pochodzące z reflektorów halogenowych przechodzi przez filtr przepuszczający promieniowanie IR, powodując powstawanie odblasków w obiektywie.
Filtr przepuszczający promieniowanie IR użyty w trybie nocnym (filtr odcinający promieniowanie IR wyłączony) może poprawić współczynnik i dokładność detekcji. Należy go usunąć, gdy promieniowanie IR jest wyłączone (w trybie dziennym, filtr odcinający promieniowanie IR włączony).
Kąt między kamerą i samochodem
Całkowity kąt między kamerą i kierunkiem ruchu samochodu można obliczyć przy użyciu poniższych wzorów.
Odległość poprzeczna między kamerą i drogą:
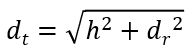
gdzie h jest wysokością montażu kamery, a dr jest odległością od pasa ruchu w metrach.
Kąt między kamerą i samochodem:
gdzie dt jest wyrażoną w metrach odległością poprzeczną miedzy kamerą i drogą, a dc jest wyrażoną w metrach odległością monitorowania.
- Wysokość montażu (h)
- Odległość monitorowania (dc)
- Kąt w pionie między kamerą i kierunkiem jazdy
- Odległość od środka pasa ruchu (dr)
- Kąt w poziomie między kamerą i kierunkiem jazdy
Zalecamy, aby całkowity kąt był mniejszy niż 30°. W poniższych tabelach podano obliczone wartości kąta między kamerą i samochodem dla typowych wysokości montażu, odległości od pasa ruchu oraz odległości monitorowania.
| Odległość monitorowania: | |||||
|---|---|---|---|---|---|
| kamery | 5 m (ok. 16 stóp) | 10 m (ok. 33 stóp) | 20 m (ok. 66 stóp) | 30 m (ok. 98 stóp) | 50 m (ok. 164 stóp) |
| 1,5 m (ok. 5 stóp) | 17° | 8,5° | 4,3° | 2,9° | 1,7° |
| 3 m (ok. 10 stóp) | 31° | 17° | 8,5° | 5,7° | 3,4° |
| 5 m (ok. 16 stóp) | 45° | 27° | 14° | 9,5° | 5,7° |
| 7 m (ok. 23 stóp) | 54° | 35° | 19° | 13° | 8,0° |
| 10 m (ok. 33 stóp) | 63° | 45° | 27° | 18° | 11° |
| Odległość monitorowania: | |||||
|---|---|---|---|---|---|
| kamery | 5 m (ok. 16 stóp) | 10 m (ok. 33 stóp) | 20 m (ok. 66 stóp) | 30 m (ok. 98 stóp) | 50 m (ok. 164 stóp) |
| 1,5 m (ok. 5 stóp) | 27° | 14° | 7,1° | 4,8° | 2,9° |
| 3 m (ok. 10 stóp) | 36° | 20° | 10º | 6,9° | 4,1° |
| 5 m (ok. 16 stóp) | 47° | 28º | 15° | 10º | 6,1° |
| 7 m (ok. 23 stóp) | 56° | 36° | 20° | 14° | 8,3° |
| 10 m (ok. 33 stóp) | 64° | 46° | 27° | 19° | 12° |
| Odległość monitorowania: | |||||
|---|---|---|---|---|---|
| kamery | 5 m (ok. 16 stóp) | 10 m (ok. 33 stóp) | 20 m (ok. 66 stóp) | 30 m (ok. 98 stóp) | 50 m (ok. 164 stóp) |
| 1,5 m (ok. 5 stóp) | 46° | 28º | 15° | 9,9° | 6,0° |
| 3 m (ok. 10 stóp) | 49° | 30° | 16° | 11° | 6,7° |
| 5 m (ok. 16 stóp) | 55° | 35° | 19° | 13° | 8,0° |
| 7 m (ok. 23 stóp) | 60° | 41° | 23° | 16° | 9,8° |
| 10 m (ok. 33 stóp) | 66° | 48° | 29° | 20° | 13° |
| Odległość monitorowania: | |||||
|---|---|---|---|---|---|
| kamery | 5 m (ok. 16 stóp) | 10 m (ok. 33 stóp) | 20 m (ok. 66 stóp) | 30 m (ok. 98 stóp) | 50 m (ok. 164 stóp) |
| 1,5 m (ok. 5 stóp) | 55° | 36° | 20° | 13° | 8,1° |
| 3 m (ok. 10 stóp) | 57° | 37° | 21° | 14° | 8,7° |
| 5 m (ok. 16 stóp) | 60° | 41° | 23° | 16° | 9,8° |
| 7 m (ok. 23 stóp) | 63° | 45° | 26° | 18° | 11° |
| 10 m (ok. 33 stóp) | 68° | 51° | 31° | 22° | 14° |