Kennzeichenerfassung
Zusammenfassung
Kennzeichenerfassung (LPC) ist die Fähigkeit einer Kamera, lesbare Abbildungen von Fahrzeugkennzeichen zu erfassen. Sie wird in Systemen zur Kennzeichenerkennung (License Plate Recognition, LPR) eingesetzt, bei denen Analysesoftware automatisch Kennzeichen erfasst und liest, z. B. für Zufahrtskontrollen, Parkraumbewirtschaftung oder Mautsysteme auf Autobahnen.
Die Erkennungsrate und Genauigkeit eines LPR-Systems ist von der Qualität der erfassten Bilder abhängig. Spezielle LPC-Kameras werden mit Standardeinstellungen geliefert, die die Kennzeichenerfassung optimieren, so dass Sie sie nur selten neu konfigurieren müssen. Bei diesen Kameras wurde alles von Entstörfiltern und Verstärkung bis zu Autofokus und Tag-Nacht-Umschaltung neu untersucht und in echten Verkehrsszenarien getestet. Die Kennzeichenerfassung erfordert andere Kameraeinstellungen als die meisten anderen Anwendungen, also spart eine spezielle LPC-Kamera viel Zeit und Aufwand.
Eine hohe Auflösung ist eine Grundvoraussetzung für gute Bildqualität. Für die Kennzeichenerfassung sollte die Auflösung hoch genug sein, um die einzelnen Buchstaben und Zahlen auflösen zu können – mindestens zwei Pixel quer durch die kleinste zu erfassende Struktur –, aber nicht so hoch, dass die Menge der Bilddaten die Softwareanalyse verlangsamt. Insbesondere wenn die LPR-Software direkt in einer Kamera ausgeführt wird, sollte die Auflösung in der Regel nicht höher als 2 MP sein.
Wenn Sie keine spezielle LPC-Kamera verwenden, müssen Sie besonders auf Beleuchtung, Installation und Kameraeinstellungen achten. Einige der wichtigsten Empfehlungen:
Nutzen Sie bei Nacht künstliche Infrarotbeleuchtung. Denn diese ist für das Auge unsichtbar und blendet die Fahrer nicht.
Falls Sie eine externe Lichtquelle nutzen müssen, platzieren Sie sie so nah wie möglich an der Kamera. Autokennzeichen reflektieren das Licht nämlich direkt zur Quelle zurück. Axis LPC-Kameras sind mit integriertem, optimiertem Infrarotlicht ausgestattet.
Minimieren Sie den Winkel zwischen der Kamera und der Fahrtrichtung des Fahrzeugs, so dass die Kennzeichen direkt von vorne aufgenommen werden. Ein Winkel von insgesamt weniger als 30° wird empfohlen.
Platzieren Sie die Kamera so, dass sie Kennzeichen in einer geeigneten Entfernung für die erwartete Fahrzeuggeschwindigkeit erfassen kann. Schnellere Fahrzeuge benötigen eine längere Erfassungsdistanz, ansonsten könnte das System nicht genug Zeit zum Lesen des Kennzeichens haben, bevor das Fahrzeug wieder außer Sicht ist. Sie müssen auch Einschränkungen durch die Schärfentiefe der Kamera und die Infrarot-Reichweite berücksichtigen.
Begrenzen Sie die maximale Verschlusszeit, um Bewegungsunschärfe zu vermeiden. Die empfohlene Verschlusszeit hängt von der Ausrichtung der Kamera sowie von der Geschwindigkeit des Fahrzeugs ab.
Beschränken Sie die maximale Verstärkung der Kamera, um eine Überbelichtung des Kennzeichens bei Nacht zu vermeiden.
Einführung
Kennzeichenerfassung (LPC) ist die Fähigkeit einer Kamera, Abbildungen lesbarer Fahrzeugkennzeichen zu erfassen. Dies ist eine Voraussetzung für die Kennzeichenerkennung (LPR), bei der die Analysesoftware das Kennzeichen automatisch findet und liest.
Die Erkennungsrate und Genauigkeit eines LPR-Systems hängt stark von der Qualität der erfassten Bilder ab. Im ersten Schritt muss die LPC-Kamera Bilder von Fahrzeugkennzeichen mit fast perfekter Schärfe und Kontrast liefern, bei Tag und Nacht und bei unterschiedlichem Wetter.
Dieses Whitepaper beschreibt die wichtigsten Komponenten für die Kennzeichenerfassung im Hinblick auf Hardware, Installation und Konfiguration. Abschnitt 3 stellt spezielle LPC-Kameras von Axis vor, die eine überragende Bildqualität liefern und leicht zu installieren und einzurichten sind. Die Abschnitte 5, 6 und 7 beschreiben die notwendigen Schritte für die Darstellung von Fahrzeugkennzeichen mit einer Axis Kamera.
Hintergrund
Für die Kennzeichenerkennung (LPR) gibt es viele Anwendungsmöglichkeiten, zum Beispiel für Zufahrtskontrolle, Parkplatzverwaltung oder bei Mautsystemen für Schnellstraßen.
LPR gibt es in unterschiedlicher Form seit Mitte der 1970er Jahre. Bis vor kurzem war sie aber auf kostspielige Großsysteme beschränkt. Mit der schnellen Entwicklung von Netzwerk-Kameras werden LPR-Systeme erschwinglicher und flexibler einsetzbar, womit sich zahlreiche neue Anwendungsmöglichkeiten eröffnen.
Die verschiedenen bereits vorhandenen Kennzeichenerkennungssysteme werden mit unterschiedlichen Namen und Akronymen bezeichnet, in den USA z. B.: Automatic License Plate Recognition (ALPR), Automatic Number Plate Recognition (ANPR), Automatic Vehicle Identification (AVI), Vehicle License Plate Recognition (VLPR), Vehicle Recognition Identifier (VRI), Car Plate Recognition (CPR), Car Plate Reader (CPR) und so weiter.
- Kennzeichenerfassung
- Software-Algorithmus
- Datenbank oder Aktion
Ein LPR-System besteht aus einer oder mehreren Kameras, die Bilder von Kfz-Kennzeichen erfassen (Kennzeichenerfassung). Die Bilder werden von einer Kennzeichen-Analysesoftware verarbeitet, die entweder direkt in der Kamera oder in einem Remote-Server ausgeführt wird. Die LPR-Software findet und liest automatisch die Kennzeichen in Echtzeit. Erkannte Kennzeichen können zur zukünftigen Verwendung in der Datenbank gespeichert werden oder Aktionen auslösen, etwa das Öffnen eines Tors.
Idealerweise sollte ein LPR-System alle passierenden Kennzeichen finden und richtig lesen. Die Bildqualität der Kamera ist entscheidend für eine hohe Erfassungsrate und Genauigkeit. Doch kein noch so ausgeklügelter Algorithmus kann ein Kennzeichen in einem Bild erkennen, das nicht deutlich zu erkennen ist.
Um Kennzeichen zu erkennen, muss die Kamera auf eine ganz bestimmte Weise angeordnet und ausgerichtet sein. Außerdem erfordert die Kennzeichenerkennung andere Kameraeinstellungen als die meisten anderen Anwendungen. Die Standardeinstellungen einer allgemeinen Kamera sind für LPC nicht geeignet, so dass Sie die Kamera neu konfigurieren müssen. Das alles erschwert die Installation, falls Sie keine spezielle LPC-/LPR-Kamera haben.
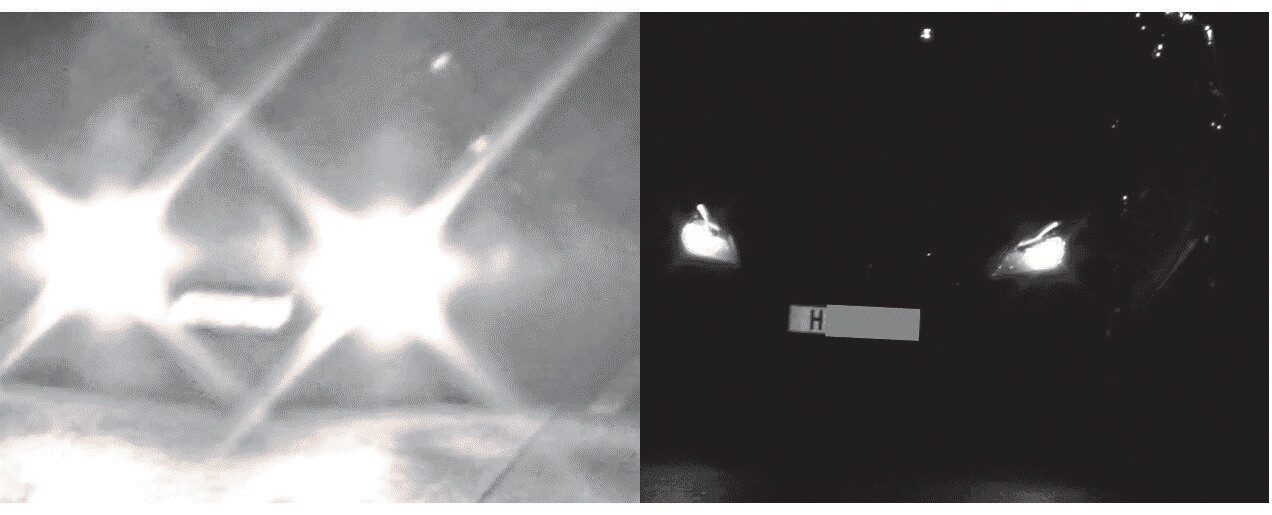
- Links: Mit einer falsch konfigurierten Kamera
- Rechts: Mit einer speziellen LPC-/LPR-Kamera
Axis LPC-/LPR-Kameras
Die speziellen Axis LPC-/LPR-Kameras wurden im Hinblick auf die hohen Anforderungen von Verkehrsanwendungen entwickelt. Die Komponenten sind so gewählt, dass sie schlechtem Wetter, starkem Wind und Temperaturschwankungen widerstehen. Das eingebaute Infrarotlicht ist besonders intensiv und so ausgerichtet, dass nachts kontrastreiche Bilder von Fahrzeugkennzeichen entstehen.
Bei den Axis LPC-/LPR-Kameras geht die Bildoptimierung über Verschlusszeit und Verstärkung hinaus. Vielmehr wurden Teile der grundlegenden Bildverarbeitung speziell für die Kennzeichenerkennung optimiert. Alles von Entstörfiltern und Verstärkung bis zu Autofokus und Tag-Nacht-Umschaltung wurde neu untersucht und in echten Verkehrsszenarien getestet.
Die Standardeinstellungen einer Axis LPC/LPR-Kamera wurden zur Optimierung der Kennzeichenerfassung gewählt, so dass Sie mit minimaler Konfiguration loslegen können.
Traffic Camera Installation Assistant (Assistent für die Installation von Verkehrskameras)
Der Assistent für die Installation von Verkehrskameras ist eine von Axis entwickelte Funktion, die Sie bei der richtigen Ausrichtung und Konfiguration der Kamera unterstützt.
Der Assistent für die Installation von Verkehrskameras gibt Ihnen bei der Ausrichtung der Kamera automatisch Feedback. Das ist möglich, weil die Kamera ihre Ausrichtung im Gravitationsfeld messen kann. Der Assistent zeigt kontinuierlich den vertikalen Kamerawinkel, den horizontalen Kamerawinkel und den Drehwinkel an und warnt, wenn diese zu groß sind. Außerdem wird die Erfassungsreichweite in Echtzeit berechnet - ein kritischer Parameter, der mit dem bloßen Auge schwer zu beurteilen ist.
Nachdem die Ausrichtung abgeschlossen ist, berechnet die Kamera die geeigneten Kameraeinstellungen für Ihre Szene und Ihr Kameramodell. Durch Anklicken von Einstellungen übernehmen aktivieren Sie die Konfiguration und die Kamera wird für das Aufzeichnen von Fahrzeugkennzeichen optimiert.
Pixeldichte
Damit ein Kennzeichen lesbar wird, sollte es auf genug Pixel auf dem Bildsensor abgebildet werden, damit die einzelnen Buchstaben und Zahlen aufgelöst werden. Um den vollen Kontrast zwischen schwarzen Linien und weißen Zwischenräumen zu erhalten, muss die kleinste Struktur, die im Bild aufgelöst werden soll, mindestens zwei Pixel breit sein. Bei einem europäischen Standardnummernschild benötigt man also 74 Pixel über die volle Breite des Kennzeichens, um die einzelnen Linien aufzulösen. Das ist das absolute Minimum für eine gute Auflösung der Nummer. Die meisten LPR-Programme benötigen etwa 100 bis 150 Pixel über die volle Kennzeichenbreite.
Eine hohe Auflösung hat den Nachteil, dass es lange dauert, bis die LPR-Software jedes Bild analysiert hat. Dies erhöht die Gefahr, bei dichtem Verkehr einzelne Kennzeichen zu verpassen. Bei der Ausführung der LPR-Software direkt in der Kamera empfehlen wir eine Auflösung von 2 MP oder weniger. Überlegen Sie, mehrere Kameras einzusetzen, um mehrere Fahrspuren abzudecken. Beachten Sie auch die empfohlene Auflösung im Handbuch der LPR-Software.
| Minimale Auflösung | |
|---|---|
| 1 Spur, Breite < 4 m | 1 MP (HD, 720p) |
| 2 Spuren, Breite < 8 m | 2 MP (Full HD, 1080p) |
Aus Kameraperspektive hängt die Anzahl der Pixel in der Breite des Kennzeichens von der Auflösung des Bildsensors und dem Sichtfeld ab.
Ein Varioobjektiv ist ein Objektiv mit Vergrößerungs- und Verkleinerungsmöglichkeit, mit dem man je nach Szene unterschiedliche Sichtfelder wählen kann.

- Links: Die Kamera zoomt auf eine Fahrspur (4 m breit). Das Fahrzeugkennzeichen umfasst 250 Pixel.
- Rechts: Die Kamera ist so weit gezoomt, dass sie fast zwei Fahrspuren (6,5 m Breite) abdeckt. Das Fahrzeugkennzeichen umfasst 154 Pixel.
| Erfassungsdistanz: | |||||
|---|---|---|---|---|---|
| 5 m | 10 m | 20 m | 30 m | 50 m | |
| 1 Spur < 4 m | 33°–44° | 17°–23° | 9°–11° | 6°–8° | 3°–6° |
| 2 Spuren < 8 m | 62°–77° | 33°–44° | 17°–23° | 11°–15° | 7°–9° |
Infrarot-Licht
Die Kennzeichenerfassung bei Nacht erfordert zusätzliche Beleuchtung. Normalerweise setzt man dafür Infrarotlicht ein, da es für das Auge unsichtbar ist und die Fahrer nicht blendet. Die meisten Fahrzeugkennzeichen reflektieren Infrarotlicht, das die Sichtbarkeit und den Kontrast des Kennzeichens bei Dunkelheit oder wolkigem Himmel verbessert. Das Infrarotlicht kann von in der Kamera eingebauten LEDs oder von externen IR-Quellen stammen.
Infrarot-Reichweite
Die Lichtintensität verringert sich mit dem Abstand zur Lichtquelle im Quadrat. Bei einem reflektierenden Objekt wie einem Kennzeichen führt dies dazu, dass bei jeder Verdoppelung des Abstands zwischen Lichtquelle und Objekt die IR-Leistung vervierfacht werden muss, damit das Objekt genauso sichtbar bleibt.
Die größtmögliche Erfassungsdistanz eines Aufbaus hängt von der verfügbaren Infrarotleistung, dem Infrarotwinkel und der Lichtempfindlichkeit der Kamera ab. Die Axis OptimizedIR-Technologie optimiert den Winkel des Infrarotlichts der integrierten LEDs in der Kamera für jede Zoomstufe. Axis Lightfinder maximiert die Reichweite der integrierten Infrarot-LEDs und reduziert die Notwendigkeit externer Infrarotquellen und zusätzlicher Stromquellen.
Da für die Kennzeichenerkennung nur kurze Verschlusszeiten benötigt werden, erfasst die Kamera weniger Licht als bei Standardeinstellungen. Allerdings erhöht das hohe Infrarot-Reflexionsvermögen des Kennzeichens seine Helligkeit. Insgesamt verkürzt sich die angegebene Infrarot-Reichweite bei Verwendung der Kamera für die Kennzeichenerkennung (bei 1/500 s Verschlusszeit) um etwa 50 %. Das gilt nicht für spezielle LPC-Kameras, die standardmäßig eine kurze Belichtungszeit haben und entsprechend konfiguriert sind.
Für eine normale Axis Kamera gilt die im Datenblatt angegebene Infrarot-Reichweite für die Standardeinstellungen der Kamera (in der Regel maximaler Verschluss 1/30 s) und für nicht reflektierende Objekte. Bei einer Axis Kamera zur Kennzeichenerfassung (LPC) gilt die im Datenblatt angegebene Infrarot-Reichweite für die Standardeinstellungen der Kamera für LPC (normalerweise maximaler Verschluss 1/500 s oder weniger) und für reflektierende Fahrzeugkennzeichen.
Externe Infrarotquellen
Bei zu geringer Reichweite der integrierten LEDs oder bei Kameras ohne Infrarot-LEDs können externe Infrarotquellen außerhalb der Kamera eingesetzt werden. Der Lichtkegel der Infrarotquelle sollte dem Sichtfeld der Kamera bei der entsprechenden Zoomstufe entsprechen.
Fahrzeugkennzeichen bestehen aus retroreflektierendem Material, das das Licht direkt zur Quelle zurückreflektiert, egal in welchem Winkel das Licht auftrifft. Bei Verwendung einer externen Infrarotquelle wird das Infrarotlicht zur Quelle zurückgeworfen.
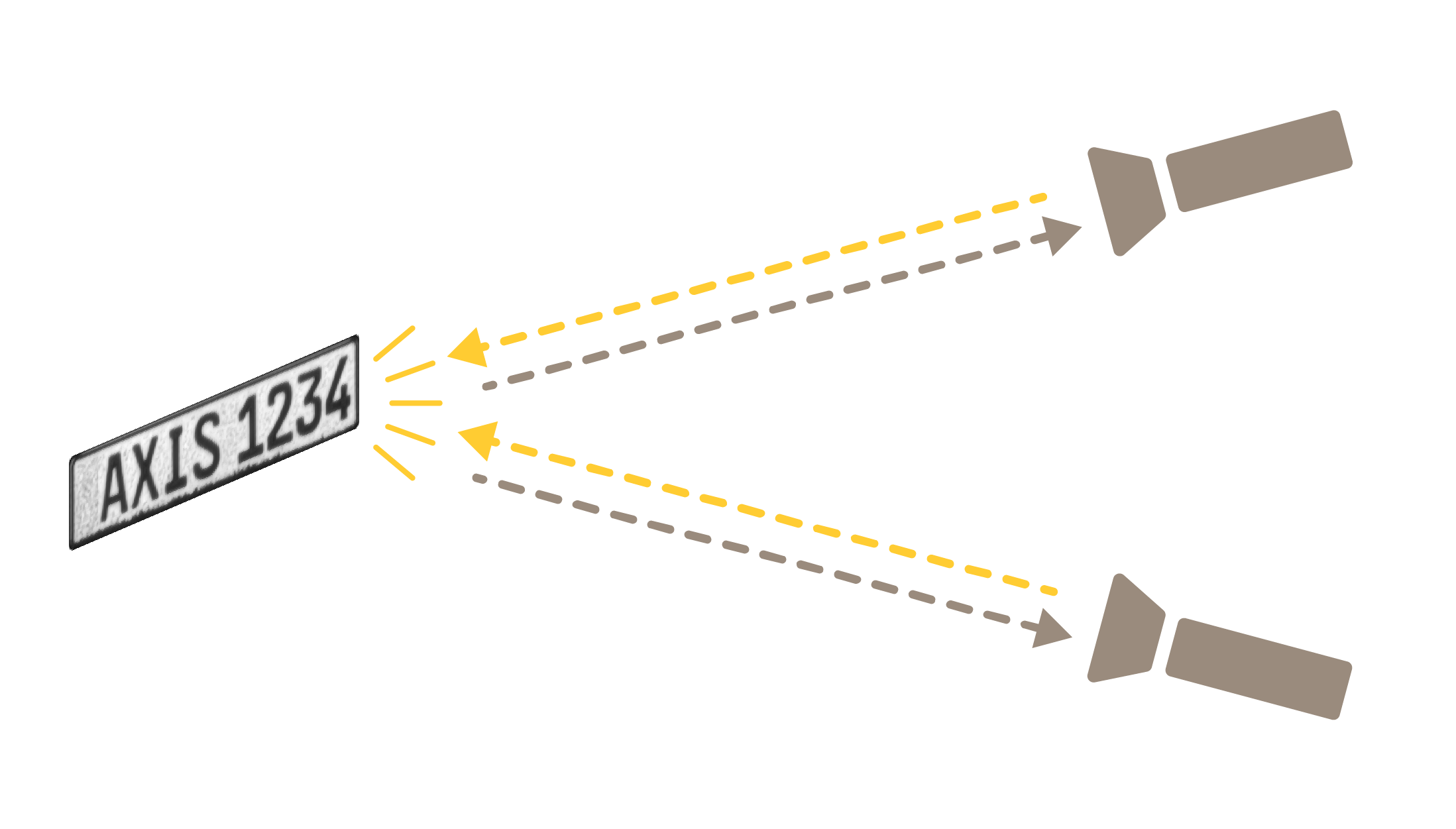
Deshalb müssen externe Infrarotquellen in der Nähe der Kamera angeordnet werden, damit das reflektierte Licht auf die Kamera trifft. Helligkeit und Kontrast eines Fahrzeugkennzeichens in einem Kamerabild verringern sich schnell, je weiter die Infrarotquelle von der Kamera entfernt ist.
Die Infrarotquelle sollte parallel zur Kamera ausgerichtet sein. So ist sichergestellt, dass das Licht auf den Teil der Straße fällt, der im Sichtfeld der Kamera liegt.
Installation
Eine Kamera zu installieren, ist ein entscheidender Schritt, da es im Nachhinein oft schwierig ist, Änderungen vorzunehmen. Sie sollten genug Zeit investieren, um sich mit den jeweiligen Nachteilen vertraut zu machen, bevor Sie die Kamera montieren.
Der Axis Traffic Camera Installation Assistant (Assistent für die Installation von Verkehrskameras) ist ein Tool, das die Installation, Ausrichtung und Optimierung für verschiedene Verkehrsszenen erleichtert. Es zeigt Ihnen relevante Winkel und Distanzen in Echtzeit an und warnt bei nicht optimaler Kameraausrichtung.
Kameraposition
- Montagehöhe
- Erfassungsdistanz
- Vertikaler Winkel zwischen Kamera und Fahrtrichtung
- Entfernung von der Straßenmitte
- Horizontaler Winkel zwischen Kamera und Fahrtrichtung
Sie sollten versuchen, den Winkel zwischen der Kamera und der Fahrtrichtung des Autos möglichst klein einzustellen, damit die Kennzeichen mehr oder weniger direkt von vorn gelesen werden können. Idealerweise sollten Sie die Kamera direkt über den Fahrzeugen und nicht zu hoch anbringen. Um zu vermeiden, dass die Kamera durch starkes Licht geblendet wird, ist es jedoch ratsam, die Kamera höher als die Scheinwerfer des Fahrzeugs zu positionieren.
Sie sollten auch vermeiden, die Kamera in der Nähe anderer starker Lichtquellen wie etwa Straßenlaternen zu platzieren. Diese könnten die automatische Belichtungsfunktion stören und Blendung und Reflexionen in der Optik hervorrufen.
Der Abschnitt Winkel zwischen Kamera und Fahrzeug enthält Tabellen mit berechneten Werten für den Kamera-Fahrzeug-Winkel für übliche Montagehöhen, Straßendistanzen und Erfassungsdistanzen.
Kameraausrichtung
Die Kamera sollte auf die Straße zeigen, so dass die relevanten Fahrspuren im Bild zentriert sind. Sie sollte nur so weit vergrößern, dass die gewünschte Zahl von Fahrspuren abgedeckt wird. Der Drehwinkel der Kamera sollte so eingestellt werden, dass das Kennzeichen parallel zu den Bildkanten ausgerichtet ist.

Die Distanz zwischen der Kamera und dem Teil der Straße, den sie erfasst, wird als Erfassungsdistanz bezeichnet. Die Erfassungsdistanz sollte sorgfältig gewählt werden, weil sie die Möglichkeit zur Erkennung von Kennzeichen auf mehrfache Weise beeinflusst. Im Rest dieses Kapitels besprechen wir verschiedene Parameter, die sich auf die Wahl der Erfassungsdistanz auswirken.
Schärfentiefe
- Höhe
- Erfassungsdistanz oder Brennweite
- Brennpunktebene
- Schärfentiefe
Die Kamera muss genau fokussiert sein, damit die Kennzeichen scharf und lesbar sind. Das Bild ist jedoch nicht nur bei einer ganz bestimmten Entfernung scharf, sondern in verschiedenen Abständen rund um die Brennpunktebene. Die Größe dieses Bereichs wird als Schärfentiefe bezeichnet.
Sie können die Schärfentiefe erhöhen, indem Sie die Blendenöffnung verkleinern. Bei Axis Kameras ist die Blendeneinstellung automatisch für die aktuellen Lichtverhältnisse optimiert und muss im Normalfall nicht geändert werden. Die Blendenöffnung sollte vorsichtig verkleinert werden, da sich dadurch die Leistung der Kamera bei geringem Licht verschlechtert.
Erkennungsreichweite
- Höhe
- Erfassungsdistanz (Brennweite)
- Vertikaler Sichtwinkel
Die Erkennungsreichweite sind die verschiedenen Distanzen entlang der Straße, in denen das Kennzeichen im Bild sichtbar und lesbar ist. Die Erkennungsreichweite ist im Idealfall das gesamte Sichtfeld der Kamera, doch dies ist nicht immer der Fall. Die Erkennungsreichweite kann durch die Schärfentiefe der Kamera begrenzt sein. Weit entfernte Fahrzeuge sind manchmal zu klein, um vom Bildsensor gut aufgelöst werden zu können.
Wetterbedingungen wie Schnee, Regen und Nebel können die Sicht bei großer Erfassungsdistanz drastisch verschlechtern und damit die Erkennungsreichweite verkürzen.
Bei Tag und gutem Wetter erhöht sich die Erkennungsreichweite abhängig von der Erfassungsdistanz. Bei schnellen Fahrzeugen muss eine lange Erfassungsdistanz gewählt werden, um genug Zeit zu haben, das Kennzeichen zu lesen, bevor das Fahrzeug das Sichtfeld verlässt.
Empfohlene Erfassungsdistanz
| Fahrzeuggeschwindigkeit | Empfohlene minimale Erfassungsdistanz |
|---|---|
| 10 km/h | 4 m |
| 30 km/h | 7 m |
| 50 km/h | 11 m |
| 80 km/h | 24 m |
| 100 km/h | 27 m |
| 130 km/h | 30 m |
Die empfohlene minimale Erfassungsdistanz hängt von der Geschwindigkeit der Fahrzeuge ab. Die Zahlen in der Tabelle basieren auf einer geschätzten Erfassungszeit von 0,2 s, was bedeutet, dass die LPR-Analysesoftware fünf Bilder pro Sekunde analysieren kann. Die Anzahl der analysierten Bilder pro Sekunde kann jedoch je nach LPR-Software und Prozessor variieren und hängt außerdem von der Bildauflösung ab. Die Tabelle liefert lediglich Richtwerte.
Die maximal mögliche Erfassungsdistanz bei Nacht wird oft durch die Infrarot-Reichweite begrenzt. Die Infrarot-Reichweite kann durch leistungsfähigere externe Infrarotquellen erhöht werden.
Kameraeinstellungen
Bei der Erfassung von Fahrzeugkennzeichen sind die Kameraeinstellungen sehr wichtig. Spezielle Kameras zur Kennzeichenerfassung werden mit geeigneten Standardeinstellungen geliefert und müssen nur minimal angepasst werden. Bei anderen Kameras müssen Sie möglicherweise einige Einstellungen ändern.
Szene-Profil für die Kennzeichenerfassung
Einige Axis Kameras verfügen über ein Szene-Profil namens Kennzeichenerfassung. Wenn dieses Profil aktiviert ist, verwendet die Kamera Bildeinstellungen, die für LPR optimiert sind und von Axis entwickelt, getestet und überprüft wurden. Die Einstellungen sind für jeden Modus der Kamera optimiert und beinhalten manchmal Änderungen an Algorithmen, die Sie nicht mit den normalen Benutzerparametern steuern können. Das Szene-Profil kann z.B. sein:
Einstellung des maximalen Verschlusses und der maximalen Verstärkung
WDR, Wide Dynamic Range, ausschalten oder auf eine WDR-Technik ohne Bewegungsartefakte umschalten, sofern das Kameramodell dies zulässt
Tone-Mapping und Kontrast so einstellen, dass sie für LPR geeignet sind
Verwenden Sie Bedingungen für die Tag/Nacht-Umschaltung, die für das Szenario des Datenaustauschs besser geeignet sind.
Der Assistent für die Installation von Verkehrskameras stellt automatisch das richtige Szene-Profil ein.
Wenn Ihre Kamera keine Szene-Profile unterstützt oder das Profil für die Kennzeichenerfassung nicht enthalten ist, müssen Sie einige Bildparameter manuell ändern. Dies kann schwierig sein, da die optimalen Bildparameter vom Kameramodell, den Installationsbedingungen und der Szene abhängen.
Max. Verschlusszeit
Fahrzeuge, die sich durch das Bild bewegen, verursachen bei einer zu langen Verschlusszeit der Kamera Bewegungsunschärfe. Die maximale Verschlusszeit hängt von der Ausrichtung der Kamera sowie von der Geschwindigkeit des Fahrzeugs ab.

Ein Auto, das direkt auf die Kamera zu fährt, bewegt sich nicht transversal im Bild, sondern erscheint nur größer, je näher es kommt. Dieser Effekt ist oft vernachlässigbar. Doch sobald ein Winkel zwischen der Kamera und der Bewegungsrichtung vorhanden ist, bewegt sich das Auto mit einer vom Winkel abhängigen Geschwindigkeit transversal im Bild. Die transversale Geschwindigkeit verursacht Bewegungsunschärfe bei normalen Verschlusszeiten um 1/30 s, so dass Sie die maximale Verschlusszeit begrenzen müssen.
Die Tabelle zeigt die empfohlene maximale Verschlusszeit abhängig vom Winkel zwischen der Kamera und der Fahrtrichtung des Autos sowie der Fahrzeuggeschwindigkeit. Der Kamerawinkel kann aus den Tabellen in Winkel zwischen Kamera und Fahrzeug geschätzt werden.
| Fahrzeuggeschwindigkeit: | |||||
|---|---|---|---|---|---|
| 30 km/h mph | 50 km/h mph | 80 km/h mph | 110 km/h mph | 130 km/h mph | |
| Kamerawinkel | |||||
| 5° | 19,3 ms | 11,6 ms | 7,2 ms | 5,3 ms | 4,5 ms |
| 10º | 9,7 ms | 5,8 ms | 3,6 ms | 2,6 ms | 2,2 ms |
| 15° | 6,5 ms | 3,9 ms | 2,4 ms | 1,8 ms | 1,5 ms |
| 20° | 4,9 ms | 2,9 ms | 1,8 ms | 1,3 ms | 1,1 ms |
| 25° | 4,0 ms | 2,4 ms | 1,5 ms | 1,1 ms | 0,9 ms |
| 30° | 3,4 ms | 2,0 ms | 1,3 ms | 0,9 ms | 0,8 ms |
Bei einer längeren Verschlusszeit fängt die Kamera mehr Licht auf, wodurch sich die Infrarot-Reichweite vergrößert. Wenn Sie die Kamera in einem 5°-Winkel statt in einem 20°-Winkel halten, können Sie die Verschlusszeit etwa um den Faktor vier verlängern. Dadurch wird die Infrarot-Reichweite verdoppelt. Die Infrarot-Reichweite im Datenblatt einer Axis Kamera wird für die maximale Standard-Verschlusszeit der Kamera angegeben.
Max. Verstärkung
Weil das Kennzeichen aus reflektierendem Material besteht, leuchtet es hell auf, wenn es intensivem Infrarotlicht ausgesetzt wird. Die Umgebung wird viel dunkler, weil andere Objekte deutlich weniger Licht reflektieren. Das kann dazu führen, dass das Kennzeichen überbelichtet und damit unlesbar wird.
Die einfachste Möglichkeit, um eine Überbelichtung des Kennzeichens zu verhindern, ist die Einschränkung der maximalen Verstärkung der Kamera. Die optimale max. Verstärkung hängt von der verfügbaren Infrarot-Intensität, dem Abstand zu den Fahrzeugen und der Lichtempfindlichkeit der Kamera ab. Werte zwischen 9 dB und 21 dB liefern bei Verwendung des integrierten Infrarotlichts einer Axis Kamera ordentliche Ergebnisse.
WDR
Ein großer Dynamikbereich (Wide Dynamic Range, WDR) beschreibt verschiedene Techniken zur Vergrößerung des Dynamikbereichs eines Bilds. WDR ist sehr praktisch, um Details hervorzuheben, die ansonsten in Schatten verborgen bleiben würden, oder um zu verhindern, dass die Kamera bei hellem Licht „geblendet“ wird.
WDR kann Bewegungsartefakte in Bildern von Fahrzeugen in Bewegung erzeugen, je nachdem, wie es in der jeweiligen Kamera umgesetzt wird. Sofern die Kameraspezifikation nichts anderes vorsieht, empfehlen wir, WDR für die Kennzeichenerfassung immer auszuschalten.
Kennzeichenerkennungssoftware
Nach der Erfassung eines Videostreams von Fahrzeugkennzeichen benötigt man eine spezielle Analysesoftware, um die Kennzeichen-Nummern aus den Bildern zu extrahieren. Die Leistung des LPR-Systems hängt nicht nur von den Kameraeinstellungen, sondern auch von der Konfiguration der LPR-Software ab. Die jeweils verwendete Software finden Sie im Benutzerhandbuch.
LPR-Software kann direkt in einer Kamera oder auf Remote-Servern ausgeführt werden.
Die Ausführung von LPR-Software auf einem Remote-Server ermöglicht eine hohe Rechenleistung, erfordert aber Video-Streaming an einen anderen Ort, wofür mehr Netzwerkbandbreite benötigt wird. Ein serverbasiertes System kann nur schwer für eine Vielzahl von Kameras skaliert werden, weil eine große Anzahl von Videostreams das Netzwerk schnell überlasten würde.
Bei Ausführung von LPR-Software direkt in der Kamera müssen nur die Buchstaben und Zahlen der Kennzeichen von der Kamera an den zentralen Server gesendet werden (obwohl die Ausgabe oft auch einen Schnappschuss des Nummernschilds und eine Kontextansicht enthält). Das minimiert die erforderliche Netzwerkbandbreite. Ein solches verteiltes System ist leicht skalierbar, weil mit einer neuen Kamera keine weiteren Ressourcen zum System hinzugefügt werden müssen.
Der Nachteil der Ausführung von LPR-Algorithmen in der Kamera ist jedoch die geringe Rechenleistung, was die Analyse der einzelnen Bilder verlangsamt. Es reduziert die maximal nutzbare Auflösung und damit die Anzahl der Fahrspuren, die jede Kamera abdecken kann. Mit der Entwicklung neuer Arten von Bildanalyse mittels KI und neuronalen Netzen werden die Kameras immer leistungsfähiger. Effizientere Algorithmen und leistungsfähigere eingebettete Prozessoren verkürzen die Analysezeit für jedes Bild und machen verteilte Systeme immer wettbewerbsfähiger.
Anhang
Optische Filter
Optische Filter im Lichtpfad der Kamera können das Bild in einigen Fällen verbessern. Allerdings blockieren sie oft eine erhebliche Lichtmenge. Dies verringert die Leistung bei dunklen Lichtbedingungen und führt zu mehr Bildrauschen.
Polarisationsfilter
Ein richtig ausgerichteter Polarisationsfilter kann Reflexionen von glatten Oberflächen wie der Windschutzscheibe eines Autos oder der Straße reduzieren. Allerdings hält er 50 % des gesamten Lichts von der Kamera fern, was die Bildqualität deutlich verschlechtern kann. Die Sichtbarkeit der Fahrzeugkennzeichen wird nur sehr begrenzt verbessert. Deshalb empfehlen wir Polarisationsfilter nicht für die Kennzeichenerfassung. Sie können jedoch für die allgemeine Verkehrsüberwachung nützlich sein, um zum Beispiel den Fahrzeuginnenraum besser sehen zu können.
IR-Durchlassfilter
Ein IR-Durchlassfilter blockiert sichtbares Licht und lässt nur Infrarotlicht zum Sensor gelangen. Weil das Kennzeichen viel mehr Infrarotlicht reflektiert als die Umgebung, erscheint das Bild dunkler. Nur das Kennzeichen tritt deutlich hervor, wodurch die LPR-Algorithmen das Kennzeichen leichter finden können. Dies kann auch verwendet werden, um den Fokus bei Nacht zu verbessern.
Der Filter kann Blendung und Spiegelungen im Objektiv verhindern, indem er das Licht von Autoscheinwerfern blockiert. Licht von LED-Scheinwerfern wird auf diese Weise sehr wirksam herausgefiltert. Halogenscheinwerfer allerdings geben viel Licht im Infrarot-Wellenlängenbereich ab. Dieses kann nicht effizient herausgefiltert werden.
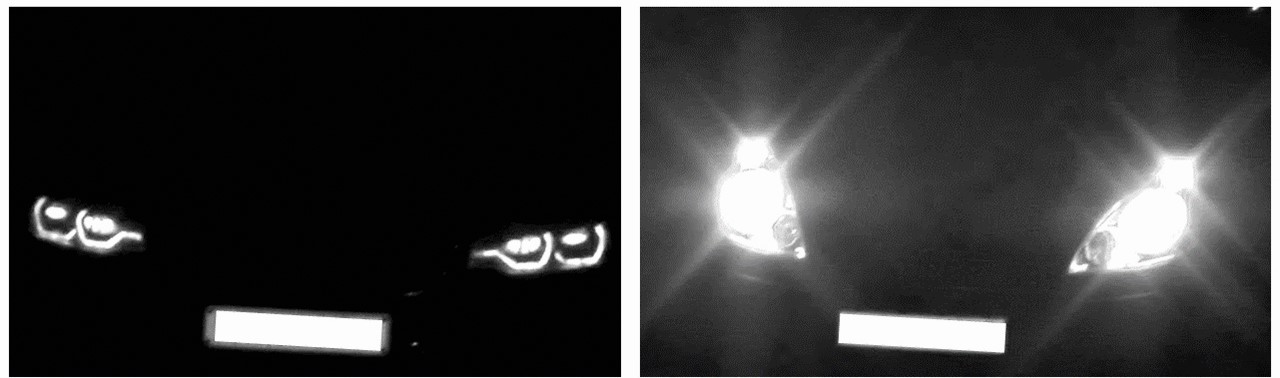
- Links: Das Licht von LED-Scheinwerfern wird vom IR-Durchlassfilter blockiert, was Blendung im Objektiv und Störlicht wirksam reduziert.
- Rechts: Das Licht von Halogenscheinwerfern passiert den IR-Durchlassfilter und verursacht Blendung im Objektiv.
Ein IR-Durchlassfilter im Nachtmodus (IR-Sperrfilter aus) kann die Erkennungsrate und Genauigkeit erhöhen. Er muss abgenommen werden, wenn das Infrarot ausgeschaltet wird (im Tagmodus, Infrarot-Sperrfilter ein).
Winkel zwischen Kamera und Fahrzeug
Der Gesamtwinkel zwischen der Kamera und der Bewegungsrichtung des Fahrzeugs kann nach den folgenden Formeln berechnet werden.
Seitlicher Abstand zwischen Kamera und Straße:
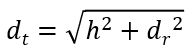
Dabei ist h die Installationshöhe der Kamera in Metern und dr die Straßendistanz in Metern.
Winkel zwischen Kamera und Fahrzeug:
Dabei ist dt die seitliche Distanz in Metern zwischen Kamera und Straße und dc die Erfassungsdistanz in Metern.
- Installationshöhe, h
- Erfassungsdistanz, dc
- Vertikaler Winkel zwischen Kamera und Fahrtrichtung
- Entfernung von der Straßenmitte, dr
- Horizontaler Winkel zwischen Kamera und Fahrtrichtung
Wir empfehlen, den Gesamtwinkel unter 30° zu halten. In den folgenden Tabellen wurde der Winkel zwischen der Kamera und dem Fahrzeug für verschiedene häufige Montagehöhen, Straßendistanzen und Erfassungsdistanzen berechnet.
| Erfassungsdistanz: | |||||
|---|---|---|---|---|---|
| Höhe | 5 m | 10 m | 20 m | 30 m | 50 m |
| 1,5 m | 17° | 8,5° | 4,3° | 2,9° | 1,7° |
| 3 m | 31° | 17° | 8,5° | 5,7° | 3,4° |
| 5 m | 45° | 27° | 14° | 9,5° | 5,7° |
| 7 m | 54° | 35° | 19° | 13° | 8,0° |
| 10 m | 63° | 45° | 27° | 18° | 11° |
| Erfassungsdistanz: | |||||
|---|---|---|---|---|---|
| Höhe | 5 m | 10 m | 20 m | 30 m | 50 m |
| 1,5 m | 27° | 14° | 7,1° | 4,8° | 2,9° |
| 3 m | 36° | 20° | 10º | 6,9° | 4,1° |
| 5 m | 47° | 28º | 15° | 10º | 6,1° |
| 7 m | 56° | 36° | 20° | 14° | 8,3° |
| 10 m | 64° | 46° | 27° | 19° | 12° |
| Erfassungsdistanz: | |||||
|---|---|---|---|---|---|
| Höhe | 5 m | 10 m | 20 m | 30 m | 50 m |
| 1,5 m | 46° | 28º | 15° | 9,9° | 6,0° |
| 3 m | 49° | 30° | 16° | 11° | 6,7° |
| 5 m | 55° | 35° | 19° | 13° | 8,0° |
| 7 m | 60° | 41° | 23° | 16° | 9,8° |
| 10 m | 66° | 48° | 29° | 20° | 13° |
| Erfassungsdistanz: | |||||
|---|---|---|---|---|---|
| Höhe | 5 m | 10 m | 20 m | 30 m | 50 m |
| 1,5 m | 55° | 36° | 20° | 13° | 8,1° |
| 3 m | 57° | 37° | 21° | 14° | 8,7° |
| 5 m | 60° | 41° | 23° | 16° | 9,8° |
| 7 m | 63° | 45° | 26° | 18° | 11° |
| 10 m | 68° | 51° | 31° | 22° | 14° |