Captura de matrículas
Resumen
La captura de matrículas (LPC) es la capacidad de una cámara de capturar imágenes legibles de matrículas. Se utiliza en los sistemas de reconocimiento de matrículas (LPR), en los que un software de analítica detecta y lee automáticamente las matrículas, una solución empleada en aplicaciones como el control de acceso, la gestión de aparcamientos o los sistemas de acceso rápido en peajes.
La tasa de detección y precisión de un sistema LPR depende de la calidad de las imágenes capturadas. Las cámaras LPC especializadas incorporan ajustes predeterminados que optimizan la captura de matrículas y minimizan la necesidad de volver a configurarla. En estas cámaras, todos sus sistemas, desde el filtrado del ruido y la gestión de la ganancia hasta el enfoque automático o el cambio día/noche, se han replanteado y puesto a prueba en situaciones de tráfico reales en exteriores. La tecnología LPC requiere unos ajustes de la cámara diferentes de la mayoría de las demás aplicaciones, por lo que al apostar directamente por una cámara LPC puede ahorrar un tiempo y un esfuerzo considerables.
Una resolución elevada es fundamental para unas imágenes de calidad. En el caso de la captura de matrículas, la resolución debe ser lo bastante alta para poder determinar las letras y los dígitos de la matrícula (por lo menos dos píxeles a lo ancho en la estructura más pequeña que deba determinarse), pero no demasiado alta, para evitar que el volumen de datos de imagen ralentice el proceso de análisis del software. Especialmente si el software LPR se ejecuta directamente en una cámara, la resolución normalmente no debe ser superior a 2 Mpx.
Si no utiliza una cámara LPC especializada, deberá prestar especial atención a la iluminación, la instalación y los ajustes de la cámara. Estas serían las recomendaciones más importantes:
Utilice iluminación IR (infrarroja) artificial de noche. Es invisible al ojo y no deslumbra a los conductores.
Si tiene que usar una fuente de luz externa, instálela lo más cerca posible de la cámara, ya que las matrículas reflejan la luz y la devuelven exactamente a su punto de origen. Las cámaras LPC de Axis incorporan iluminación IR integrada y optimizada.
Minimice el ángulo entre la cámara y la dirección de desplazamiento del coche para ver las matrículas de frente. Se recomienda no superar un ángulo total de 30°.
Instale la cámara de modo que capture las matrículas a una distancia adecuada respecto a la velocidad prevista del vehículo. A mayor velocidad, mayor debe ser la distancia de captura, ya que de lo contrario el sistema no tendría tiempo de leer la matrícula antes de que el vehículo salga del campo de visión. También hay que tener en cuenta las limitaciones asociadas a la profundidad de campo de la cámara y el rango de la luz IR.
Limite el tiempo de obturación máximo para evitar la distorsión por movimiento. El tiempo de obturación recomendado depende de la alineación de la cámara y también de la velocidad de los vehículos.
Limite la ganancia máxima de la cámara para evitar la sobreexposición de la matrícula por la noche.
Introducción
La captura de matrículas (LPC) es la capacidad de una cámara de capturar imágenes de matrículas legibles. Es una condición previa para el reconocimiento de matrículas (LPR), que consiste en la detección y lectura automática de matrículas a través de un software de analítica.
La tasa de detección y precisión de un sistema LPR depende enormemente de la calidad de las imágenes capturadas. Para empezar, la cámara LPC debería ofrecer unas imágenes de las matrículas con una nitidez y un contraste prácticamente perfectos, tanto de día como de noche y en distintas condiciones meteorológicas.
Este documento técnico explica los aspectos básicos para capturar matrículas: la elección de los equipos, la instalación y la configuración. En el apartado 3 hablamos de las cámaras LPC de Axis, que ofrecen una calidad de imagen de primer nivel, además de simplificar la instalación y la configuración. Los apartados 5, 6 y 7 detallan los pasos necesarios para crear imágenes óptimas de matrículas con cualquier cámara Axis.
Contexto
El reconocimiento de matrículas (LPR) tiene muchas aplicaciones, como el control de acceso, la gestión de aparcamientos o los sistemas de acceso rápido en peajes.
El LPR existe como concepto desde mediados de la década de 1970, aunque hasta hace poco estaba circunscrito a unos sistemas grandes y caros. Con el rápido desarrollo de las cámaras de red, los sistemas LPR son cada vez más económicos y flexibles, lo que abre la puerta a un mayor abanico de aplicaciones.
Son muchos los nombres y acrónimos que se utilizan para hacer referencia a sistemas más o menos equivalentes al reconocimiento de matrículas: reconocimiento automático de matrículas (ALPR), reconocimiento automático del número de matrícula (ANPR), identificación automática de vehículos (AVI), reconocimiento de matrículas de vehículos (VLPR), identificador de reconocimiento de vehículos (VRI), reconocimiento de matrículas de vehículos (CPR) y lector de matrículas de vehículos (CPR), entre otros.
- Captura de matrículas
- Algoritmo de software
- Base de datos o acción
Un sistema LPR está formado por una cámara o varias que capturan imágenes de matrículas (captura de matrícula). Luego las imágenes son procesadas por un software de analítica de matrículas directamente en la cámara o en un servidor remoto. El software LPR busca y lee automáticamente las matrículas en tiempo real. Las matrículas detectadas pueden guardarse en una base de datos como referencia para más adelante o pueden utilizarse para activar acciones, como abrir una puerta.
Idealmente, el sistema LPR debe encontrar las matrículas de todos los vehículos que circulan por la vía y leerlas correctamente. Sin embargo, la calidad de imagen que proporciona la cámara es vital para garantizar una buena tasa de detección y precisión. Ningún algoritmo, por muy sofisticado que sea, puede leer la matrícula de una imagen si la matrícula no se ve claramente.
Para detectar las matrículas, la cámara debe estar colocada y alineada de una forma muy concreta. Además, los ajustes de la cámara para LPC son distintos de los que se necesitan para muchas otras aplicaciones. Los ajustes predeterminados de una cámara general no son adecuados para LPC, por lo que tendrá que volver a configurar la cámara. Por todos estos motivos la instalación es bastante laboriosa a menos que utilice una cámara LPC/LPR.
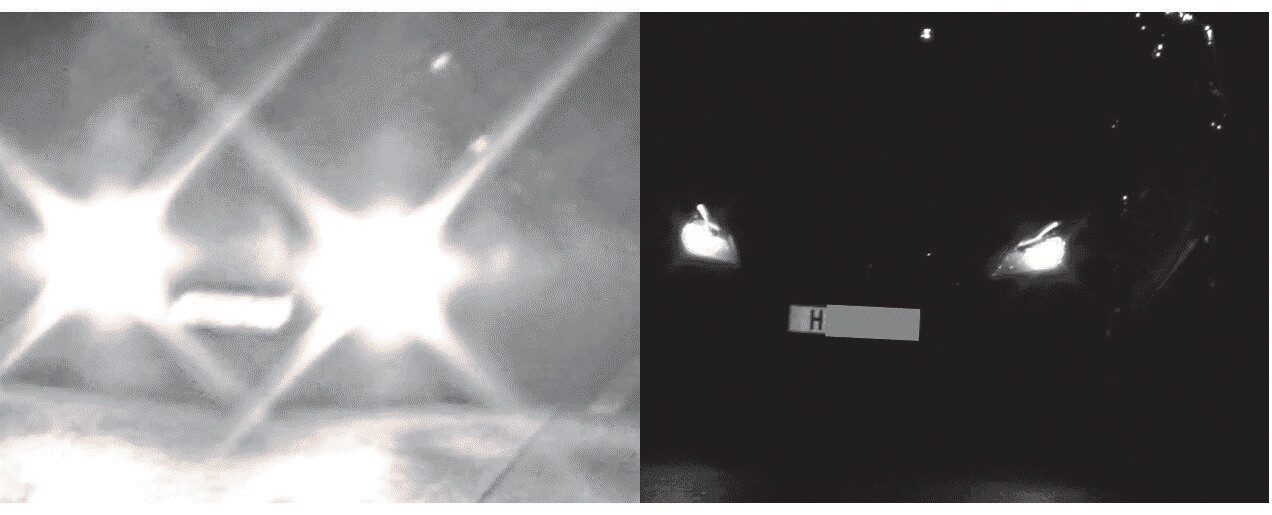
- Izquierda: utilizando una cámara mal configurada
- Derecha: utilizando una cámara LPC/LPR de Axis
Cámaras LPC/LPR de Axis
Las cámaras LPC/LPR de Axis están diseñadas teniendo en cuenta las exigentes condiciones de las instalaciones de supervisión del tráfico. Sus componentes están pensados para resistir el mal tiempo, los vientos fuertes y los cambios de temperatura. La luz IR incorporada es especialmente intensa y dirigida para ofrecer imágenes de alto contraste de las matrículas por la noche.
En las cámaras LPC/LPR de Axis, la optimización de la imagen va más allá de los ajustes de ganancia y tiempo de obturación. En estas cámaras, determinadas partes del procesamiento de la imagen están configuradas especialmente pensando en la LPC. Se evalúan y prueban en condiciones de tráfico reales todo tipo de ajustes, desde los filtros de ruido y la gestión de la ganancia hasta el enfoque automático y el cambio día/noche.
Los ajustes predeterminados de una cámara LPC/LPR de Axis se han elegido para optimizar la captura de matrículas, para que pueda empezar a trabajar con una configuración mínima.
Asistente para la instalación de cámaras de tráfico
El asistente para la instalación de cámaras de tráfico es una función desarrollada por Axis para ayudarle a alinear y configurar la cámara correctamente.
El asistente le dará feedback automáticamente mientras alinea la cámara. Podrá darle esta información porque la cámara puede medir su orientación en el campo gravitatorio. El asistente le muestra continuamente el ángulo vertical de la cámara, el ángulo horizontal de la cámara y el ángulo de giro, y genera una advertencia si son excesivos. Además, calcula la distancia de captura en tiempo real, un parámetro imprescindible que resulta difícil de establecer a ojo.
Una vez finalizada la alineación, la cámara calcula los ajustes adecuados para su escena y modelo de cámara específicos. Al hacer clic en Apply settings (Aplicar ajustes) se activa la configuración y la cámara se optimiza para capturar matrículas.
Densidad de píxel
El número de la matrícula solo será legible si el sensor de imagen captura la imagen con suficientes píxeles, lo que permitirá descifrar cada letra y cada dígito. Para conseguir el máximo contraste entre las líneas negras y el espacio blanco, se necesitan como mínimo dos píxeles entre la estructura más pequeña que queremos identificar en la imagen. En una matrícula europea estándar, necesitamos 74 píxeles en toda la anchura de la matrícula para descifrar cada línea. Se trata del mínimo para poder determinar correctamente el número, aunque la mayoría de aplicaciones de LPR necesitan en torno a 100-150 píxeles en toda la anchura de la matrícula.
Una resolución alta tiene un inconveniente y es que el software LPR necesita más tiempo para analizar cada imagen. Existe el riesgo de no capturar todas las matrículas cuando el tráfico es denso. Al utilizar aplicaciones de LPR directamente en la cámara, recomendamos utilizar una resolución de 2 Mpx o menos. Valore la posibilidad de utilizar varias cámaras para cubrir más carriles. Y consulte también la resolución recomendada en el manual de la aplicación de LPR.
| Resolución mínima | |
|---|---|
| 1 carril, anchura < 4 m | 1 Mpx (HD, 720p) |
| 2 carriles, anchura < 8 m | 2 Mpx (Full HD, 1080p) |
Desde la perspectiva de la cámara, el número de píxeles en la matrícula depende de la resolución del sensor de imagen y del campo de visión.
Con un objetivo varifocal se puede acercar y alejar la imagen, lo que le ofrece libertad para elegir el campo de visión de una escena concreta.

- Izquierda: la cámara hace zoom en un solo carril (4 m de ancho). La matrícula ocupa 250 píxeles.
- Derecha: la cámara se aleja para cubrir casi dos carriles (6,5 m de ancho). La matrícula ocupa 154 píxeles.
| Distancia de captura: | |||||
|---|---|---|---|---|---|
| 5 m | 10 m | 20 m | 30 m | 50 m | |
| 1 carril < 4 m | 33°–44° | 17°–23° | 9°–11° | 6°–8° | 3°–6° |
| 2 carriles < 8 m | 62°–77° | 33°–44° | 17°–23° | 11°–15° | 7°–9° |
Luz IR
Para capturar matrículas por la noche, es necesario disponer de iluminación artificial. En general, se utiliza la luz infrarroja (IR) porque es invisible al ojo y no deslumbra a los conductores. La mayoría de las licencias reflejan la luz IR, y la luz IR aumenta la visibilidad y el contraste de la matrícula en la oscuridad o cuando está nublado. La luz IR puede proceder de los LED integrados en la cámara o de fuentes IR externas.
Alcance de la luz IR
La intensidad de la luz disminuye cuando aumenta la distancia hasta la fuente de luz en una proporción al cuadrado. En un objeto reflectante, como una matrícula, eso implica que cada vez que se duplica la distancia entre la fuente de luz y el objeto, hay que multiplicar por cuatro la potencia de luz IR para que la visibilidad del objeto sea la misma.
La distancia de captura máxima de una solución concreta depende de la potencia de luz IR disponible, el ángulo de la luz IR y la sensibilidad a la luz de la cámara. La tecnología Axis OptimizedIR optimiza el ángulo de la luz IR de los LED integrados en la cámara para cada nivel de zoom. Axis Lightfinder maximiza el alcance de los LED IR integrados y reduce la necesidad de recurrir a fuentes de luz IR externas y equipos de alimentación adicionales.
A causa de los reducidos tiempos de obturación necesarios para la LPC, la cámara captará menos luz que con los ajustes predeterminados. Sin embargo, la elevada reflectancia de la luz IR de la matrícula aumentará el brillo de la matrícula. En resumen, el alcance especificado para la luz IR se reducirá en torno al 50% al utilizar la cámara para LPC (con un tiempo de obturación de 1/500 s). Este principio no es aplicable a las cámaras especializadas en LPC, que tienen un tiempo de exposición más bajo por omisión y también unas especificaciones diferentes.
Para una cámara Axis general, el alcance IR que se especifica en la hoja de datos es válido para los ajustes predeterminados de la cámara (normalmente, ajuste de obturador máximo 1/30 s) y para objetos no reflectantes. Para una cámara LPC de Axis, el alcance IR que se especifica en la hoja de datos es válido para los ajustes predeterminados de la cámara para LPC (normalmente, ajuste de obturador máximo 1/500 s o menos) y para matrículas reflectantes.
Fuentes de luz IR externas
Si la iluminación IR proporcionada por los LED IR integrados no es suficiente o si la cámara no incorpora LED IR integrados, es necesario utilizar fuentes de luz IR externas. El cono de luz de la fuente de luz IR debe coincidir con el campo de visión de la cámara en el nivel de zoom utilizado en cada caso.
Las matrículas están hechas de un material retrorreflectante, es decir, que refleja la luz directamente a su origen, independientemente del ángulo de incidencia de la luz sobre la matrícula. Al utilizar una fuente de luz IR externa, la luz IR reflejada volverá al punto de origen.
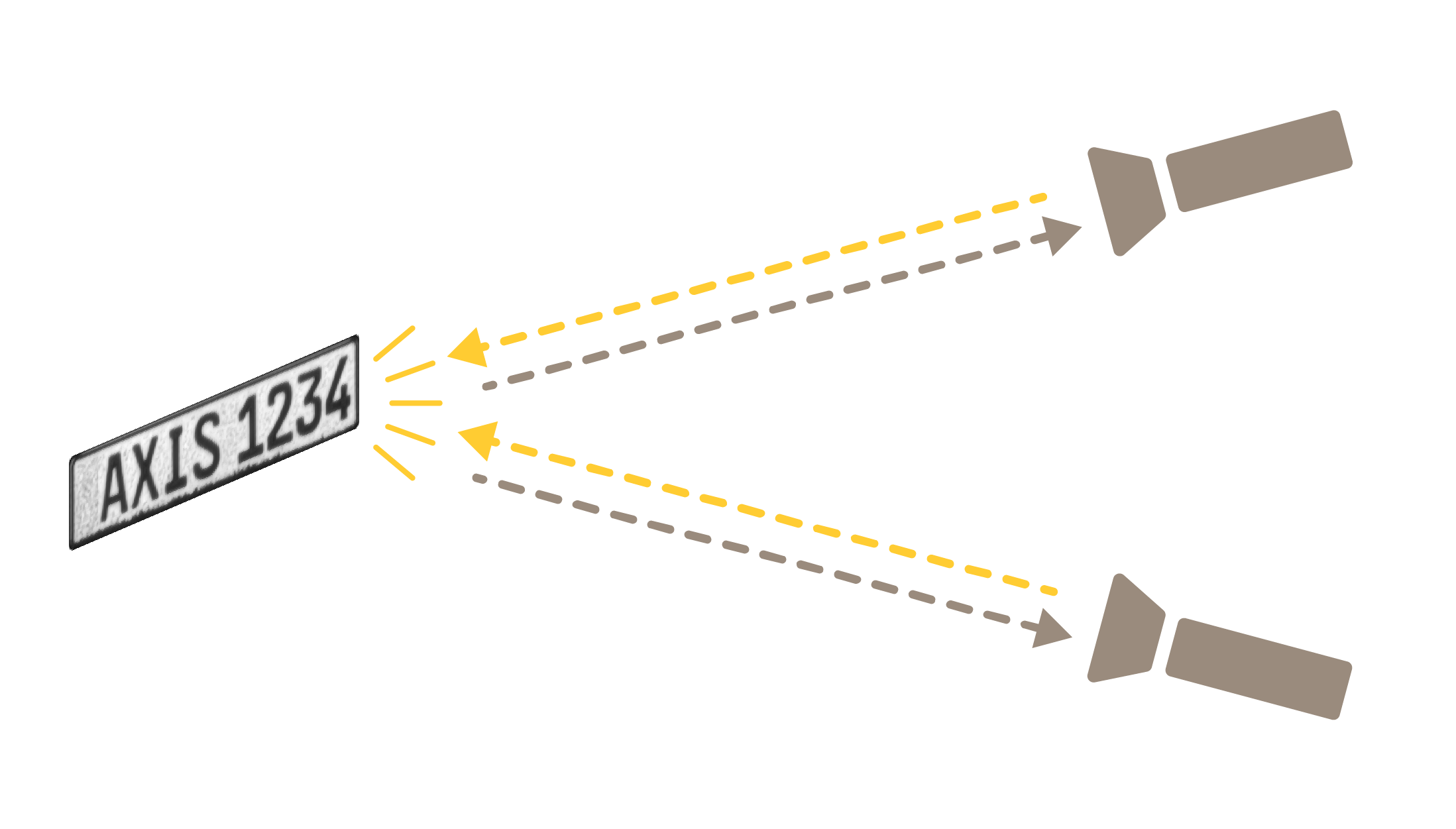
Por este motivo, es necesario colocar las fuentes de luz IR externas cerca de la cámara, de modo que la luz reflejada termine llegando a la cámara. El brillo y el contraste de una matrícula en una imagen captada por una cámara baja rápidamente a medida que alejamos la fuente de luz IR de la cámara.
La fuente de luz IR debe alinearse en paralelo a la cámara para conseguir que la luz cubra la parte de la carretera que queda dentro del campo de visión de la cámara.
Instalación
La instalación de una cámara a menudo es un paso crítico, ya que es difícil hacer cambios más adelante. Es importante dedicar un tiempo a entender las implicaciones de cada opción antes de empezar con el montaje de la cámara.
El asistente para la instalación de cámaras de tráfico de Axis es una herramienta pensada para ayudarle con la instalación, la alineación y el ajuste de la cámara para escenas de tráfico concretas. Puede guiarle mostrándole los ángulos y las distancias relevantes en tiempo real y avisándole si la alineación de la cámara no es la óptima.
Posición de la cámara
- Altura de montaje
- Distancia de captura
- Ángulo vertical entre la cámara y la dirección de desplazamiento
- Distancia desde el centro de la carretera
- Ángulo horizontal entre la cámara y la dirección de desplazamiento
Debe tratar de minimizar el ángulo entre la cámara y la dirección de desplazamiento del coche para que la primera vea las matrículas más o menos de frente. A poder ser, debe colocar la cámara en línea recta por encima de los vehículos y en una posición no demasiado alta. Sin embargo, es buena idea situar la cámara por encima de los faros de los coches para evitar que una luz muy intensa impida captar bien las imágenes.
También debe evitar colocar la cámara cerca de otras fuentes de luz intensa, como farolas. Pueden interferir con la función de exposición automática y provocar reflejos y deslumbramientos en la óptica.
Visite la sección Ángulo entre la cámara y el vehículo para consultar tablas con los valores calculados del ángulo entre la cámara y el coche para conocer las alturas de montaje, distancias de carretera y distancias de captura más habituales.
Alineación de la cámara
La cámara debe apuntar hacia la carretera, de modo que en el centro de la imagen aparezcan los carriles necesarios. La imagen debe ampliarse para cubrir el número de carriles deseados, pero no más. El ángulo de giro de la cámara debe ajustarse de modo que la matrícula quede en paralelo a los contornos de la imagen.

La distancia entre la cámara y la parte de la carretera objeto de grabación es lo que se conoce como distancia de captura. La distancia de captura debe estudiarse detenidamente, ya que influirá de diferentes formas en la posibilidad de detectar las matrículas. En el resto de este capítulo hablaremos de diferentes parámetros que influyen en la selección de la distancia de captura.
Profundidad de campo
- Altura
- Distancia de captura o distancia focal
- Plano focal
- Profundidad de campo
La cámara tiene que estar bien enfocada para que las matrículas sean nítidas y legibles. Sin embargo, la imagen debe ser nítida no solo a una distancia concreta, sino en un rango de distancias en torno al plano focal. El tamaño de este rango es lo que se conoce como profundidad de campo (DOF).
Puede aumentar la DOF reduciendo el tamaño de la abertura del iris. En las cámaras Axis, el ajuste del iris se optimiza automáticamente en función del nivel de iluminación actual y normalmente no es necesario que lo modifique. Al reducir la apertura del iris hay que actuar con prudencia, ya que puede perjudicar el rendimiento de la cámara en condiciones de poca luz.
Rango detectable
- Altura
- Distancia de captura (distancia focal)
- Ángulo de visión vertical
El rango detectable es el rango de distancias en la carretera en que la matrícula resulta visible y legible en la imagen. Idealmente el rango detectable coincide con el campo de visión de la cámara, aunque en la práctica no siempre es así. El rango detectable puede verse limitado por la profundidad de campo de la cámara, y los vehículos que están demasiado lejos a veces son demasiado pequeños para que el sensor de imagen los procese correctamente.
Determinadas condiciones meteorológicas, como la nieve, la lluvia y la niebla, pueden reducir drásticamente las distancias de captura y, por lo tanto, el rango detectable.
De día y con buenas condiciones meteorológicas, el rango detectable aumenta con una distancia de captura más larga. En el caso de los vehículos que circulan a gran velocidad, tendrá que usar una distancia de captura larga para que dé suficiente tiempo para leer la matrícula antes de que el coche esté fuera del campo de visión.
Distancia de captura recomendada
| Velocidad del vehículo | Distancia de captura mínima recomendada |
|---|---|
| 10 km/h | 4 m |
| 30 km/h | 7 m |
| 50 km/h | 11 m |
| 80 km/h | 24 m |
| 100 km/h | 27 m |
| 130 km/h | 30 m |
La distancia de captura mínima recomendada depende de la velocidad de los vehículos. Las cifras de la tabla se basan en un tiempo de detección estimado de 0,2 s, lo que significa que el software de analítica LPR puede analizar cinco fotogramas por segundo. El número de fotogramas analizados por segundo puede variar según el software LPR y los procesadores, y depende también de la resolución de las imágenes. Esta tabla es solo una guía.
Por la noche, la distancia de captura máxima a menudo está limitada por el alcance de la luz IR, aunque es posible mejorarlo utilizando fuentes de luz IR externas más potentes.
Ajustes de la cámara
Los ajustes de la cámara son determinantes a la hora de capturar matrículas. Las cámaras especializadas en este tipo de aplicaciones vienen con los ajustes predeterminados adecuados y apenas requieren una configuración mínima. Para otras cámaras, es posible que tenga que cambiar algunos ajustes.
Perfil de escena para la captura de matrículas
Algunas cámaras Axis tienen un perfil de escena denominado captura de matrículas. Cuando se activa este perfil, la cámara utiliza ajustes de imagen optimizados para LPR que han sido desarrollados, probados y verificados por Axis. Los ajustes están optimizados para cada modo de cámara y a veces incluyen cambios en los algoritmos que no es posible controlar con los parámetros de usuario normales. El perfil de escena puede, por ejemplo:
Ajustar el tiempo de obturación máximo y la ganancia máxima
Desactivar WDR o pasar a una técnica WDR sin artefactos de movimiento si el modelo de cámara dispone de ella.
Regular el mapeado de tonos y el contraste de forma adecuada para LPR
Utilizar las condiciones de cambio de modo diurno/nocturno que mejor se adapten a la situación del tráfico.
El asistente para la instalación de cámaras de tráfico ajusta automáticamente el perfil de escena correcto.
Si su cámara no admite perfiles de escena o no incluye el perfil de captura de la matrícula, deberá cambiar manualmente algunos parámetros de la imagen. Esta operación puede resultar difícil, puesto que los parámetros de imagen óptimos dependen del modelo de cámara, las condiciones de instalación y la escena.
Tiempo de obturación máximo
Los vehículos en movimiento que aparecen en la imagen provocarán distorsión por movimiento si el tiempo de obturación de la cámara es demasiado largo. El tiempo de obturación máximo depende de la alineación de la cámara y también de la velocidad de los vehículos.

Un coche que se acerca a la cámara de frente no se mueve transversalmente en la imagen; su tamaño simplemente aumenta a medida que se acerca. Este efecto es a menudo insignificante. Sin embargo, si hay un ángulo entre la cámara y la dirección del movimiento, el coche se moverá transversalmente en la imagen a una velocidad que dependerá del ángulo. La velocidad transversal provoca distorsión por movimiento en tiempos de obturación normales en torno a 1/30 s, por lo que es necesario limitar el tiempo de obturación máximo.
Esta tabla muestra el tiempo de obturación máximo recomendado en función del ángulo entre la cámara y la dirección de desplazamiento del coche, y la velocidad de los vehículos. El ángulo de la cámara puede calcularse a partir de las tablas de Ángulo entre la cámara y el vehículo.
| Velocidad del vehículo: | |||||
|---|---|---|---|---|---|
| 30 km/h (aprox. 19 mph) | 50 km/h (aprox. 31 mph) | 80 km/h (aprox. 50 mph) | 110 km/h (aprox. 68 mph) | 130 km/h (aprox. 81 mph) | |
| Ángulo de la cámara | |||||
| 5° | 19,3 ms | 11,6 ms | 7,2 ms | 5,3 ms | 4,5 ms |
| 10º | 9,7 ms | 5,8 ms | 3,6 ms | 2,6 ms | 2,2 ms |
| 15° | 6,5 ms | 3,9 ms | 2,4 ms | 1,8 ms | 1,5 ms |
| 20° | 4,9 ms | 2,9 ms | 1,8 ms | 1,3 ms | 1,1 ms |
| 25° | 4,0 ms | 2,4 ms | 1,5 ms | 1,1 ms | 0,9 ms |
| 30° | 3,4 ms | 2,0 ms | 1,3 ms | 0,9 ms | 0,8 ms |
La cámara capturará más luz con un tiempo de obturación más largo, y de esta forma aumentará el rango de la luz IR. Si se monta la cámara con un ángulo de 5° en lugar de 20°, es posible multiplicar por cuatro el tiempo de obturación. De esta forma se duplicará el rango de la luz IR. En la hoja de datos técnicos de una cámara Axis, se especifica el rango de la luz IR para el tiempo máximo de obturación predeterminado de la cámara.
Ganancia máxima
Puesto que la matrícula está hecha de un material reflectante, brillará intensamente al exponerla a una luz IR intensa. Todo lo que hay a su alrededor será mucho más oscuro, puesto que otros objetos reflejan mucho menos luz. El resultado será una sobreexposición de la matrícula, que impedirá su lectura.
La forma más sencilla de evitar la sobreexposición de la matrícula es limitar la ganancia máxima de la cámara. La ganancia máxima óptima depende de la intensidad de la luz IR disponible, la distancia hasta los vehículos y la sensibilidad a la luz de la cámara. En general, unos valores de entre 9 dB y 21 dB ofrecen unos resultados razonables al utilizar la luz IR integrada de una cámara Axis.
WDR
El amplio rango dinámico (WDR) hace referencia a diferentes técnicas para aumentar el rango dinámico de una imagen. El WDR es muy útil para destacar detalles que de lo contrario quedarían ocultos en las sombras o para evitar que una luz intensa “ciegue” la cámara.
El WDR puede provocar artefactos de movimiento en las imágenes de vehículos en movimiento, en función de cómo se aplique esta tecnología en una cámara concreta. A menos que la especificación de la cámara indique lo contrario, nuestra recomendación es que desactive siempre el WDR para la captura de matrículas.
Software de reconocimiento de matrículas
Después de capturar un flujo de vídeo de matrículas, hace falta un software de analítica especial para extraer los números de matrícula de las imágenes. El rendimiento del sistema LPR no solo depende de los ajustes de la cámara, sino también de la configuración del software LPR. Consulte siempre el manual del software utilizado en cada caso.
El software LPR puede ejecutarse directamente en la cámara o en servidores remotos.
La ejecución de software LPR en un servidor remoto permite disponer de una gran potencia de procesamiento, pero requiere el envío del vídeo a un punto remoto, lo que consume más ancho de banda de red. Además, es más complicado adaptar un sistema basado en servidores a una infraestructura con diferentes cámaras, porque un exceso de flujos de vídeo podría colapsar fácilmente la red.
En cambio, si se ejecuta el software LPR directamente en la cámara solo hace falta enviar las letras y los dígitos de la matrícula de la cámara al servidor central (aunque a menudo también se incluye una captura de la matrícula y una imagen del entorno). Por tanto, el ancho de banda de red necesario es inferior. Un sistema distribuido de este tipo, además, puede ampliarse fácilmente, porque aunque se añada una cámara nueva no es necesario añadir otros recursos al sistema.
El inconveniente de ejecutar algoritmos LPR en la cámara es que la potencia de procesamiento es limitada, por lo que el análisis de cada imagen lleva más tiempo. También plantea limitaciones en cuanto a la resolución máxima que puede usarse y, por tanto, en el número de carriles que puede cubrir cada cámara. Con el desarrollo de nuevos tipos de analíticas de imagen a través de la IA y las redes neuronales, las cámaras están ganando en potencia a pasos agigantados. Unos algoritmos más eficientes, y unos procesadores integrados más potentes, reducirán el tiempo necesario para analizar cada imagen y mejorarán la competitividad de los sistemas distribuidos.
Apéndice
Filtros ópticos
Si se añaden filtros ópticos a la trayectoria de luz de la cámara es posible mejorar la imagen en determinadas situaciones. Sin embargo, a menudo bloquean una cantidad considerable de luz. Esto disminuye el rendimiento con poca luz e introduce más ruido en la imagen.
Filtro de polarización
Un filtro de polarización correctamente alineado puede reducir los reflejos procedentes de superficies lisas, como el parabrisas de un coche o la superficie de la carretera. Sin embargo, bloqueará el 50% de la luz recibida por la cámara, lo que puede tener un impacto considerable en la calidad de imagen. La mejora de la visibilidad de las matrículas es muy limitada. Por este motivo, no recomendamos usar un filtro de polarización en aplicaciones de LPC, aunque puede resultar útil para una vigilancia del tráfico más general, por ejemplo para mejorar la visibilidad del interior de un vehículo.
Filtro de paso de IR
Un filtro de paso de IR bloquea la luz visible y solo permite la llegada al sensor de luz IR. Como la matrícula refleja mucho más la luz IR que su entorno, la imagen será más oscura y solo la matrícula brillará con intensidad, lo que puede ayudar a los algoritmos de LPR a identificar la matrícula. También puede facilitar el enfoque de noche.
El filtro puede evitar deslumbramientos y reflejos en el objetivo al bloquear la luz de los faros de los coches. Esta solución filtra de forma muy eficaz la luz de los faros de LED. En cambio, los faros halógenos emiten mucha luz dentro del intervalo de longitud de onda infrarroja, una luz difícil de eliminar de forma eficaz.
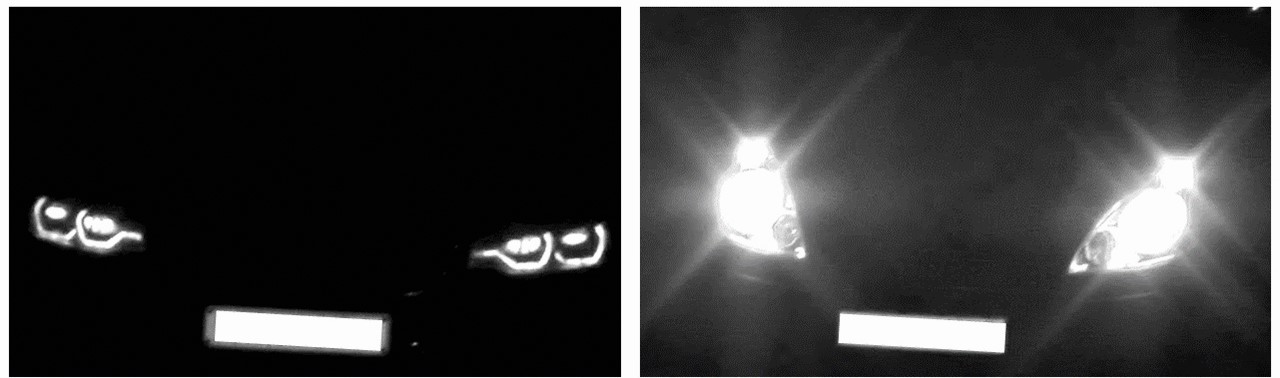
- Izquierda: el filtro de paso de IR bloquea la luz de los faros de LED y reduce eficazmente los deslumbramientos y la luz parásita.
- Derecha: la luz de los faros halógenos consigue superar el filtro de paso de IR y produce deslumbramientos en el objetivo.
Un filtro de paso de IR en modo nocturno (filtro bloqueador IR desactivado) puede mejorar los índices de detección y la precisión. Sin embargo, debe retirarse cuando se desactiva la función infrarroja (en modo día, con el filtro bloqueador IR activado).
Ángulo entre la cámara y el vehículo
El ángulo total entre la cámara y la dirección de movimiento del vehículo puede calcularse utilizando las siguientes fórmulas.
Distancia transversal entre la cámara y la carretera:
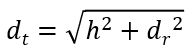
donde h es la altura de instalación de la cámara en metros y dr es la distancia de la carretera en metros.
Ángulo entre la cámara y el vehículo:
donde dt es la distancia transversal en metros entre la cámara y la carretera y dc es la distancia de captura en metros.
- Altura de instalación, h
- Distancia de captura, dc
- Ángulo vertical entre la cámara y la dirección de desplazamiento
- Distancia desde el centro de la carretera, dr
- Ángulo horizontal entre la cámara y la dirección de desplazamiento
Recomendamos no superar un ángulo total de 30°. En las siguientes tablas encontrará los valores calculados del ángulo entre la cámara y el vehículo para algunas alturas de montaje, distancias de carretera y distancias de captura.
| Distancia de captura: | |||||
|---|---|---|---|---|---|
| Altura | 5 m | 10 m | 20 m | 30 m | 50 m |
| 1,5 m | 17° | 8,5° | 4,3° | 2,9° | 1,7° |
| 3 m | 31° | 17° | 8,5° | 5,7° | 3,4° |
| 5 m | 45° | 27° | 14° | 9,5° | 5,7° |
| 7 m | 54° | 35° | 19° | 13° | 8,0° |
| 10 m | 63° | 45° | 27° | 18° | 11° |
| Distancia de captura: | |||||
|---|---|---|---|---|---|
| Altura | 5 m | 10 m | 20 m | 30 m | 50 m |
| 1,5 m | 27° | 14° | 7,1° | 4,8° | 2,9° |
| 3 m | 36° | 20° | 10º | 6,9° | 4,1° |
| 5 m | 47° | 28º | 15° | 10º | 6,1° |
| 7 m | 56° | 36° | 20° | 14° | 8,3° |
| 10 m | 64° | 46° | 27° | 19° | 12° |
| Distancia de captura: | |||||
|---|---|---|---|---|---|
| Altura | 5 m | 10 m | 20 m | 30 m | 50 m |
| 1,5 m | 46° | 28º | 15° | 9,9° | 6,0° |
| 3 m | 49° | 30° | 16° | 11° | 6,7° |
| 5 m | 55° | 35° | 19° | 13° | 8,0° |
| 7 m | 60° | 41° | 23° | 16° | 9,8° |
| 10 m | 66° | 48° | 29° | 20° | 13° |
| Distancia de captura: | |||||
|---|---|---|---|---|---|
| Altura | 5 m | 10 m | 20 m | 30 m | 50 m |
| 1,5 m | 55° | 36° | 20° | 13° | 8,1° |
| 3 m | 57° | 37° | 21° | 14° | 8,7° |
| 5 m | 60° | 41° | 23° | 16° | 9,8° |
| 7 m | 63° | 45° | 26° | 18° | 11° |
| 10 m | 68° | 51° | 31° | 22° | 14° |