一部のパノラマカメラでのオートパイロット機能
概要
オートパイロットは、PTZカメラと組み合わせて使用する全指向性カメラでアクティブな映像監視を提供する機能です。対象となる移動する物体は、全指向性カメラの固定カメラヘッドによって全方向から検出することが可能で、その後PTZカメラが自動的に向きを変え、ズームして物体を追跡します。
この360°の物体検出とPTZ制御を組み合わせることで、全体の映像と、あらゆるインシデントの詳細映像の両方を提供することができます。
オートパイロットは、AXIS Q6300-EPanoramic CameraとAXIS Q6020-EPanoramic CameraのAXIS Object Analyticsに含まれています。次のいずれかの組み合わせを使用している場合、オートパイロットを使用できます:
AXIS Q61/Q63/P56 PTZカメラシリーズのPTZカメラを搭載したAXISQ6300-E Panoramic Camera
AXIS Q60PTZカメラシリーズのPTZカメラを搭載したAXIS Q6020-E Panoramic Camera
PTZ制御を自動化することで、オートパイロットはオペレータの負担を軽減し、全体監視から詳細監視へ素早く切り替えられるようにします。これにより状況把握が向上し、人物の認識や特定、ナンバープレートの識別といった用途を強化できます。
はじめに
オートパイロットは、互換性のある接続された PTZ カメラをパノラマ カメラによって検出された移動物体に向けることで、AXIS Q6300-E Panoramic CameraおよびAXIS Q6020-E Panoramic Cameraでアクティブな映像監視を提供します。
人物の身元確認や車両のナンバープレートの読み取りなど、物体の認識や識別が必要な場合、パノラマカメラでは十分な詳細を提供できない場合があります。このような場合、オートパイロット機能はPTZカメラを自動で操作して、対象物をより近くから映し出し、追跡します。
このホワイト ペーパーでは、オートパイロット機能の仕組みと設定、アクションルール、制限について説明します。
360°の物体検出とPTZオートトラッキングを組み合わせる
AXIS Q6300-E Panoramic CameraとAXIS Q6020-E Panoramic Cameraは、それぞれ4つのカメラヘッドを搭載した全指向性カメラです。これらのカメラは、物体検出機能付きの360°全方位の映像を提供します。これらのカメラはそれぞれAXIS Q61/Q63/P56PTZカメラシリーズとAXIS Q60 PTZカメラシリーズのカメラと組み合わせて運用できるように特別に設計されています。この組み合わせにより、ひとつの統合カメラソリューションで高解像度の全体映像と、発生したすべてのインシデントの詳細映像を撮影できます。
オートパイロット機能により、PTZオートトラッキングが有効になります。 全指向性カメラで対象範囲を監視し、PTZカメラで人物、車両、対象範囲のその他の移動物体を追跡します。
対象物体を分類したり、特定のタイプを除外したりできます。特定の範囲や方向に、より高い優先度を設定することができます。オートパイロットは、警備員への通知、録画の開始、スピーカーによる音声クリップの再生などのアクションをトリガーすることもできます。
オートパイロットの設定
オートパイロットは、AXIS Object Analyticsに含まれています。パノラマカメラのWebインターフェースで、Analytics > AXIS Object Analytics > Autopilotからオートパイロットにアクセスできます。AXIS Object Analyticsの詳細情報については、パノラマカメラユーザーマニュアルを参照ください。
シナリオを作成してオートパイロットを有効にする
オートパイロットはデフォルトでオフになっております。有効にするには、AXIS Object Analyticsを起動し、少なくとも1つのシナリオを作成してください。選択できるシナリオは2つあります:
物体の対象範囲への侵入 – オートパイロット。この推奨シナリオは物体検出を基準としており、対象となる物体を分類できます。
対象範囲での動き – オートパイロット。ビデオ動体検知に基づくこのシナリオでは、物体を分類できません。
表示領域を完全にカバーするには、パノラマカメラの4つの各センサーに対して、1つずつシナリオを作成する必要があります。
優先度を割り当てる
各シナリオ内で優先度を割り当てることができます。ゲートなど、特に注意を払う必要があるエリアなど、優先度の高いシナリオで物体が検出された場合、オートパイロットは優先度の低いシナリオよりもそれらのシナリオを優先します。
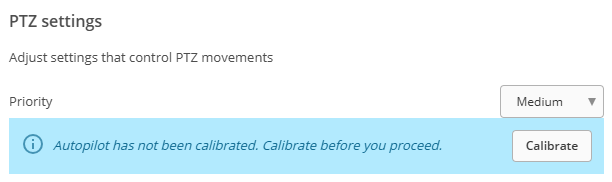
オートパイロットの校正
初めて使用する前に、オートパイロットを校正する必要があります。この操作はシナリオ内で簡単に行うことができます。
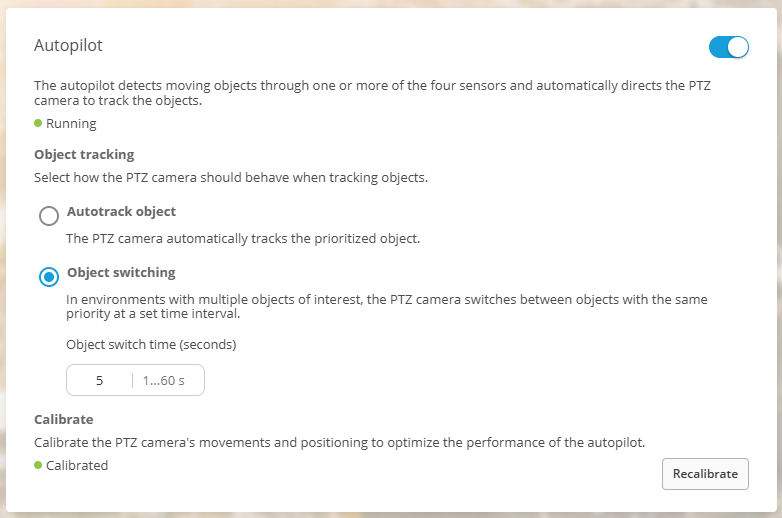
オートパイロットを有効にして追跡オプションを更新する
AXIS Object Analytics >設定では以下を行うことができます:
オートパイロットのオン/オフ
複数の物体が検出された場合の、PTZカメラの追跡動作の設定
物体切替え時間の調整:PTZカメラが物体を切り替える時間の間隔。
物体の追跡
オートパイロットは、検知した物体をパン/チルト角による座標系にマッピングして追跡します。各物体には、パン、チルト、サイズの3つの属性が割り当てられます。
PTZカメラの視野内に収まる程度に互いに近接している物体は、同一グループとしてまとめられます。各グループにはパン、チルト、ズームの各属性が割り当てられ、PTZカメラが追跡する際に使用されます。オートパイロットは、グループが存在する限り同じグループを継続して追跡します。物体の切り替えが有効になっている場合、設定された物体切り替え時間が経過すると、オートパイロットは(存在する場合)新しい物体へ追跡を切り替えます。
ズーム
オートパイロットは、検知した物体または物体のグループにズームインします。物体が移動した場合、または2つ以上の物体が互いに離れる方向に移動した場合、オートパイロットがズームアウトして、被写体が映像から外れるのを防ぎます。また、オートパイロットはズーム倍率を自動調整し、映像全体に対して物体が適切なサイズで表示されるように維持します。
アクションルール
オートパイロットを使用して、様々なアクションをトリガーすることができます。オートパイロットが物体の追跡を開始または停止する際には、オートパイロット追跡 のイベントが生成されます。このイベントは、次の動作をトリガーします:
録画の開始
ブックマークの作成
VMSへのログエントリの生成。
これらの連携により、重要なイベントが記録され、後に簡単に確認することができます。
アクションルールを使用して、オートパイロット機能をオンにすることもできます。例えば、監視エリアが無人になることが想定される営業時間外に、スケジュールでオートパイロットをオンにする というアクションを有効にできます。
指向性音声検知
オートパイロットは、より優先度の高い指向性音声検知と連携して動作します。オートパイロットが対象を追跡している間に指向性音声検知が音を検出すると、オートパイロットは一時停止し、PTZカメラは検出された音の方向へ向きを変更します。方向転換後、オートパイロットは新しい位置から再開し、音を発した物体が視界内にある場合は、その物体を追跡します。
互換性
オートパイロットは、AXIS Q6300-E Panoramic CameraまたはAXIS Q6020-E Panoramic Cameraと互換性のあるすべてのPTZカメラに対応しています。
制限事項
他のすべての検知機能と同様に、オートパイロットの性能が十分に発揮されない状況があります。制限を理解することで、適切な期待値を設定し、それに合わせてシステムを設計できるようになります。
いくつか既知の制限事項があります:
誤検知。 オートパイロットはビデオ物体検知またはビデオ動体検知に依存しており、照明条件が悪い場合、影がある場合、または旗、木、その他の植物などの動く要素によって影響を受ける場合があります。これらにより誤検知が発生し、オートパイロットが存在しない物体を追跡することがあります。
高速で移動する物体。 非常に高速な物体は正確に追跡することが困難になる場合があります。
物体密度が高い場合。検出された移動物体が多数あるシーンでは、問題が生じる場合があります。オートパイロットには、検知されたすべての物体を順番に表示する機能は組み込まれていません。
パノラマカメラの視野内の最小物体の大きさも、オートパイロットの性能に影響します。このサイズはAXIS Object Analyticsによって設定されます。オートパイロットで人を追跡できるようにするには、画像全体の高さの少なくとも8%を人、6%を車両に占めるように設定することが推奨されています。さらに、水平方向に35°、または垂直方向に25°を超える大きさの物体は除外されます。