ナンバープレートキャプチャー
概要
ナンバープレートキャプチャー (LPC) は、読み取り可能なナンバープレートの画像をキャプチャーするカメラの機能です。アクセスコントロール、駐車場管理、高速道路での高速通行料徴収などの用途で分析ソフトウェアが自動的にナンバープレートを読み取る、ナンバープレート認識 (LPR) システムで使用されます。
LPRシステムの検知率と精度は、キャプチャーされた画像の品質に左右されます。専用のLPCカメラのデフォルト設定は、ナンバープレートのキャプチャーを最適化し、再設定の必要性を最小限に抑えるように設定されています。これらのカメラでは、ノイズフィルタリング、ゲイン処理、オートフォーカス、デイナイトモードの切り替えなど、すべて実際の屋外交通シナリオで再評価・テストされています。LPCは、他のほとんどのアプリケーションとは異なるカメラの設定を必要とするため、専用のLPCカメラを使用することで、時間と労力を大幅に節約できます。
高解像度は画質の重要な要素です。ナンバープレートキャプチャーの場合、解像度は個々の文字と数字を解像するのに十分な高さ (解像する最小構造に2ピクセル以上) であり、かつ画像データの量がソフトウェア分析の速度を低下させるほど高くない必要があります。特にLPRソフトウェアをカメラで直接実行する場合、解像度は通常2メガピクセル未満である必要があります。
専用のLPCカメラを使用しない場合は、照明、設置、カメラの設定に、特別な注意を払う必要があります。以下は、最も重要な推奨事項の一部です。
夜間は人工IR (赤外線) 照明を使用します。赤外線は不可視で、運転者を眩惑させません。
外部光源を使用する必要がある場合は、できる限りカメラの近くに配置します。これは、ナンバープレートが光を光源にまっすぐ跳ね返すためです。AxisのLPCカメラには、最適化された赤外線照明が一体化されています。
カメラと車両の進行方向の間の角度を最小限にして、ナンバープレートが正面から見えるようにします。推奨される合計角度は、30°未満です。
予想される車両速度に適した距離でナンバープレートをキャプチャーできるようカメラを配置します。速度が速いほど、長い撮影距離が必要です。撮影距離が短いと、車両が視野から出るまでに、システムがナンバープレートを読み取る時間を確保できないことがあります。カメラの被写界深度とIR到達距離によって生じる制限も考慮に入れる必要があります。
モーションブラーを防ぐため、最大シャッター時間を制限します。推奨シャッター時間は、カメラの配置と車両の速度によって異なります。
夜間にナンバープレートが露出オーバーにならないように、カメラの最大ゲインを制限します。
はじめに
ナンバープレートキャプチャー (LPC) は、読み取り可能なナンバープレートの画像をキャプチャーするカメラの機能です。これは、分析ソフトウェアがナンバープレートを自動的に検知して読み取る、ナンバープレート認識 (LPR) の必須条件です。
LPRシステムの検知率と精度は、キャプチャーされた画像の品質に大きく左右されます。全行程の最初のステップとして、LPCカメラは、昼夜を問わず、さまざまな気象条件下で、ほぼ完璧なシャープネスとコントラストを備えたナンバープレートの画像を提供する必要があります。
このホワイトペーパーでは、ハードウェアの選択、設置および設定の観点から、ナンバープレートキャプチャーの主要コンポーネントについて説明します。第3項では、Axisが提供する特殊なLPCカメラを紹介します。このカメラは優れた画質を提供し、設置と設定を簡素化します。第5項、6項、7項では、Axisカメラでナンバープレートの画像処理を行うために必要な手順について詳しく説明します。
背景
ナンバープレート認識 (LPR) には、アクセスコントロール、駐車場管理、高速道路での高速通行料徴収など、多くの用途があります。
LPRは、1970年代半ばから利用されるようになり、最近までその使用は大規模で高価なシステムに限定されていました。ネットワークカメラの急速な発展に伴い、LPRシステムはより安価で柔軟性が向上し、幅広い用途に対応できるようになりました。
多くの名称と頭字語が、ナンバープレート認識とほぼ同等のシステムに使用されています: 自動ライセンスプレート認識 (ALPR)、自動ナンバープレート認識 (ANPR)、自動車両識別 (AVI)、車両ライセンスプレート認識 (VLPR)、車両認識識別 (VRI)、車両プレート認識 (CPR)、車両プレートリーダー (CPR)など。
- ナンバープレートキャプチャー
- ソフトウェアアルゴリズム
- データベースまたはアクション
LPRシステムは、ナンバープレートの画像をキャプチャーする1台以上のカメラ (ナンバープレートキャプチャー) で構成されます。画像は、カメラで直接、またはリモートサーバーで実行されているナンバープレート分析ソフトウェアによって処理されます。LPRソフトウェアは、リアルタイムでナンバープレートを自動的に検知し、読み取ります。検知されたナンバープレートの番号は、今後の使用に備えてデータベースに保存する、またはゲートを開くなどのアクションをトリガーするために使用することができます。
LPRシステムが通過するすべてのナンバープレートを検知し、正しく読み取れることが理想的です。カメラが提供する画質は、高い検知率と精度にとって非常に重要です。どんなに高度なアルゴリズムでも、ナンバープレートがはっきりと見えない画像からナンバープレートを読み取ることはできません。
ナンバープレートを確実に検知するには、カメラをかなり特殊な方法で配置し、位置合わせする必要があります。さらに、LPCには他のほとんどのアプリケーションと異なるカメラの設定が必要です。一般的なカメラのデフォルト設定はLPCに適していないため、カメラを再設定する必要があります。そのため、専用のLPC/LPRカメラを使用しない限り、設置作業が非常に複雑になります。
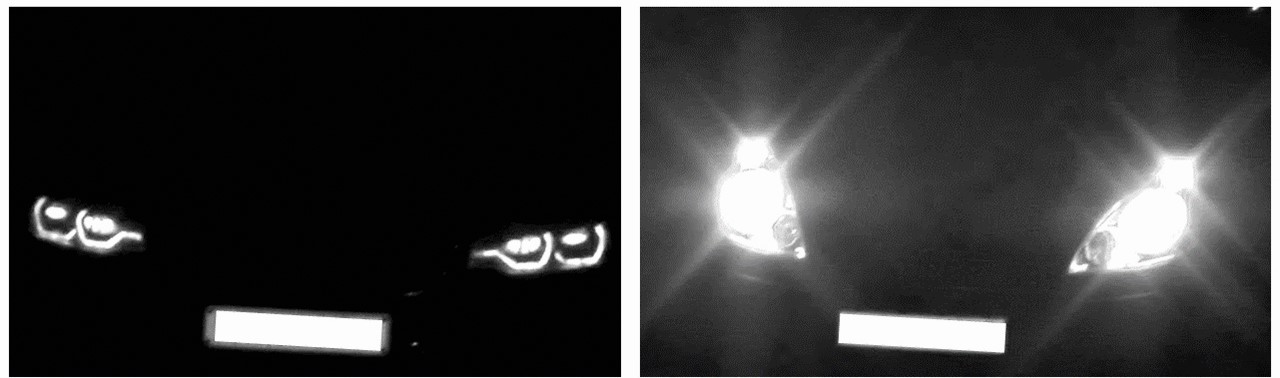
- 左: 設定が不適切なカメラを使用
- 右: Axisの専用LPC/LPRカメラを使用
Axis LPC/LPRカメラ
Axisの専用LPC/LPRカメラは、交通環境の厳しい監視条件に配慮して開発されています。コンポーネントは、悪天候、強風、温度変化に耐えるよう選択されています。内蔵の赤外線照明は特に強力で、夜間にナンバープレートの高コントラスト画像を提供するように設計されています。
Axis LPC/LPRカメラにおける画像の最適化は、シャッター時間やゲイン設定だけではありません。これらのカメラでは、基本的な画像処理の一部がLPC専用に再設定されています。ノイズフィルタリング、ゲイン処理、オートフォーカス、デイナイトモードの切り替えなど、すべて実際の屋外交通シナリオで再評価・テストされています。
Axis LPC/LPRカメラのデフォルト設定はナンバープレートのキャプチャーを最適化するように選択されているため、必要最小限の設定で開始することができます。
交通カメラ設置アシスタント
交通カメラ設置アシスタントは、カメラの適切な配置と設定を支援することを目的としてAxisが開発した機能です。
交通カメラ設置アシスタントは、カメラの位置を調整している間、自動的にフィードバックを提供します。これが可能なのは、カメラが重力場におけるカメラ自体の向きを測定できるためです。アシスタントは、カメラの垂直方向の角度と水平方向の角度、およびロール角度を連続的に表示し、角度が大きすぎる場合は警告メッセージも表示します。また、目視では推測が難しい重要なパラメーターである撮影距離をリアルタイムで計算します。
位置合わせが完了すると、カメラは特定のシーンとカメラの機種に適したカメラ設定を計算します。[Apply settings (設定を適用)] をクリックすると設定が有効になり、カメラはナンバープレートをキャプチャーするように最適化されます。
ピクセル密度
数字を読み取れるようにするには、ナンバープレートをイメージセンサーの十分な量のピクセルに画像化して、個々の文字と数字を解像する必要があります。黒いラインと白いスペースの高コントラストを得るには、画像で解像する最小構造に2ピクセル以上が必要です。これは、欧州の標準的なナンバープレートの場合、各ラインを解像するには、プレートの全幅にわたり74ピクセルが必要であることを意味します。これは、数字を適切に解像するための最小値であり、ほとんどのLPRソフトウェアでは、プレートの全幅にわたり約100~150ピクセルが必要です。
高解像度には、LPRソフトウェアが分析するのに各画像にかかる時間が長いという欠点があります。これは、交通の密度が高いときに一部のナンバープレートを見逃すリスクを高めます。LPRソフトウェアをカメラで直接実行する場合は、2メガピクセル以下の解像度を使用することをお勧めします。より多くの車線をカバーするには、複数のカメラを使用することを検討してください。また、LPRソフトウェアの取扱説明書に記載されている推奨解像度を確認してください。
| 最低解像度 | |
|---|---|
| 1車線、幅 < 4 m (~13 ft) | 1メガピクセル (HD、720p) |
| 2車線、幅 < 8 m (~25 ft) | 2メガピクセル (Full HD、1080p) |
カメラの観点からは、ナンバープレートの横幅のピクセル数は、イメージセンサーの解像度と視野によって異なります。
バリフォーカルレンズはズームイン/ズームアウトできるため、特定のシーンの視野を自由に選択することができます。

- 左: カメラが1車線 (幅4 m) にズームインしている場合。ナンバープレートは250ピクセルをカバーしています。
- 右: カメラがズームアウトしてほぼ2車線 (幅6.5m) をカバーしている場合。ナンバープレートは154ピクセルをカバーしています。
| 撮影距離: | |||||
|---|---|---|---|---|---|
| 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) | |
| 1車線 < 4 m (~13 ft) | 33°~44° | 17°~23° | 9°~11° | 6°~8° | 3°~6° |
| 2車線 < 8 m (~25 ft) | 62°~77° | 33°~44° | 17°~23° | 11°~15° | 7°~9° |
赤外線照明
夜間にナンバープレートをキャプチャーするには、人工照明が必要です。通常は赤外線 (IR) 照明が使用されます。赤外線は不可視で、運転者を眩惑させないためです。ほとんどのナンバープレートは赤外線を反射します。赤外線照明は、暗闇の中や曇った日のナンバープレートの視認性とコントラストを向上させます。赤外線照明は、カメラに内蔵されたLEDから、または外部の赤外線光源から照射されます。
IR到達距離
光の強度は、光源までの距離の2乗に比例して減少します。そのため、ナンバープレートなどの反射性の物体の場合、物体が同じ視認性を維持できるようにするためには、光源と物体の間の距離が2倍になるごとにIRの放射強度を4倍に上げる必要があります。
特定の撮影シーンにおける最長撮影距離は、使用可能なIR放射強度、IR角度、およびカメラの光感度によって異なります。Axis OptimizedIRテクノロジーは、ズームレベルごとにカメラに統合されたLEDのIR角度を最適化します。Axis Lightfinderは、内蔵IR LEDの照射距離を最大限に引き伸ばし、外部赤外線照明と電源を追加する必要性を低減します。
LPCに必要なシャッター時間は短いため、カメラが取り込む光の量はデフォルト設定よりも少なくなります。ただし、ナンバープレートの高いIR反射率により、プレートの輝度が増加します。全体として見ると、カメラをLPCに使用した場合 (シャッター時間: 1/500秒)、規定のIR到達距離は約50%減少します。これは、デフォルトの露出時間が短く、それに応じて規定されている特殊なLPCカメラには適用されません。
⼀般的なAxisカメラの場合、データシートに記載されているIR到達距離はカメラのデフォルト設定 (通常は最大シャッター時間: 1/30秒) および非反射性の物体に対して有効です。Axis LPCカメラの場合、データシートに記載されているIR到達距離はカメラのLPCのデフォルト設定 (通常は最大シャッター時間: 1/500秒以下) および反射性のナンバープレートに対して有効です。
外部赤外線照明
内蔵IR LEDによるIR到達距離が十分でない場合、またはカメラにIR LEDが内蔵されていない場合は、外部赤外線照明を使用することができます。赤外線照明の光円錐は、使用するズームレベルでのカメラの視野と一致している必要があります。
ナンバープレートは再帰反射材で作られています。つまり、光はプレートに当たる角度に関係なく、光源にまっすぐに跳ね返ります。外部赤外線照明を使用すると、反射した赤外線照明は光源に向かって戻ります。
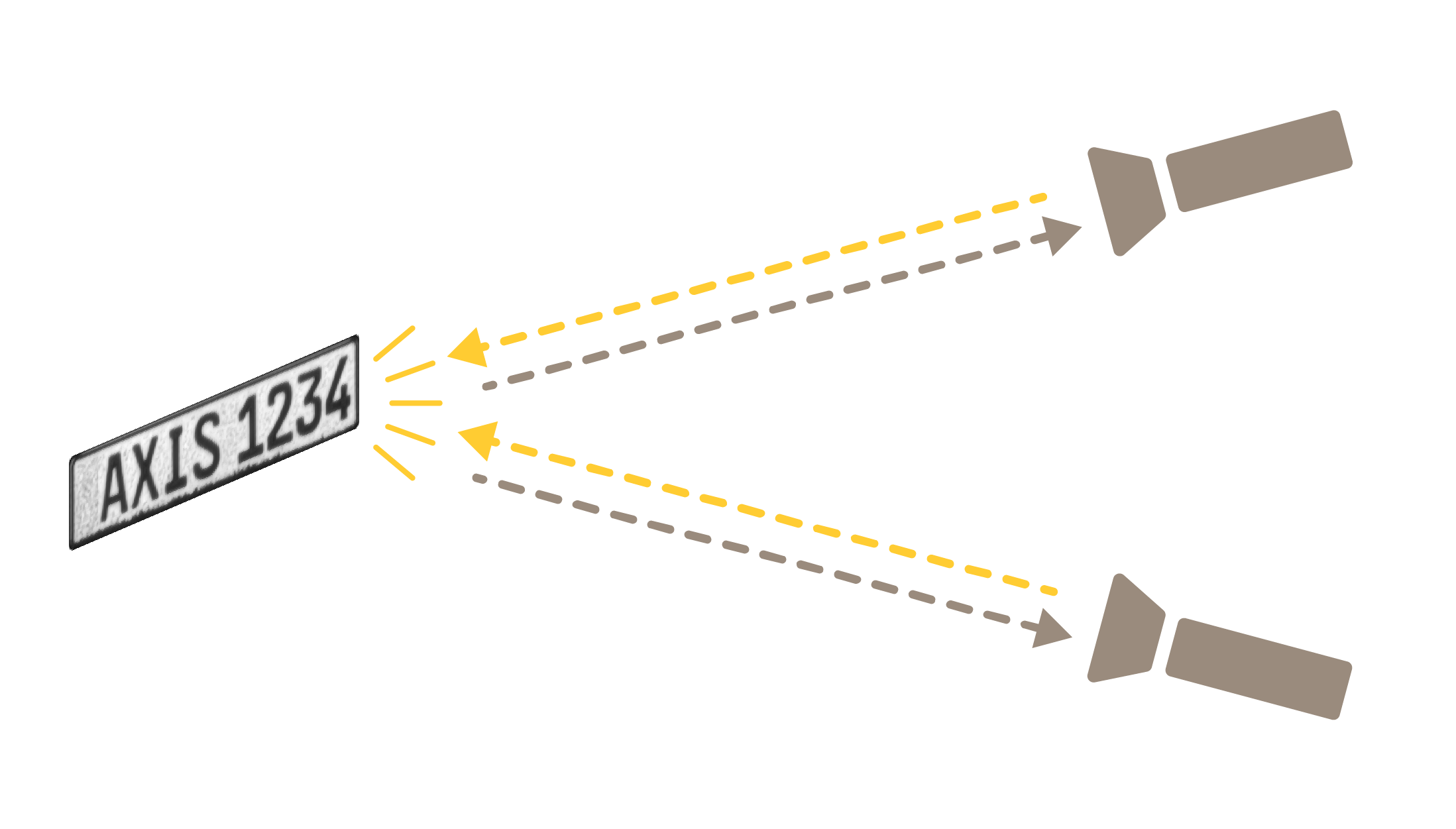
そのため、反射光がカメラに当たるようにするには、外部赤外線照明をカメラの近くに配置する必要があります。カメラ画像のナンバープレートの輝度とコントラストは、赤外線照明がカメラから離れるにつれて急速に低下します。
赤外線照明は、カメラの視野内にある路上部分に光が当たるように、カメラと平行に配置する必要があります。
設置
カメラの設置は、再度実施することが難しい場合があるため、重要なステップとなります。カメラの設置を開始する前に、時間をかけて関連するトレードオフを把握する必要があります。
Axisの交通カメラ設置アシスタントは、特定の交通シーンにおけるカメラの設置、位置合わせ、微調整を支援するために開発されたツールです。関連する角度と距離をリアルタイムで表示し、カメラの配置が最適でない場合に警告することで、最適な配置に導きます。
カメラの位置
- 取り付け位置の高さ
- キャプチャー距離
- カメラと進行方向の垂直方向の角度
- 道路の中心からの距離
- カメラと進行方向の水平方向の角度
ナンバープレートをできる限り正面からとらえられるよう、カメラと車両の進行方向との間の角度を最小限に抑えるようにします。理想的には、カメラを車両の真上の高すぎない位置に設置します。ただし、強い光でカメラが遮られるのを防ぐため、カメラを車両のヘッドライトよりも高い位置に取り付けることをお勧めします。
また、街灯など、その他の強力な光源の近くにカメラを設置しないようにします。強い光は、自動露出機能に干渉し、光学レンズにグレアや反射を引き起こす可能性があるためです。
カメラと車両の間の角度の項に掲載されている、一般的な取り付け高さ、カメラと車線中心間の距離、および捕捉距離に対するカメラと車両の間の角度の計算値に関する表を参照してください。
カメラの位置合わせ
対象の車線が画像の中央にくるように、カメラを道路に向ける必要があります。必要な車線数をカバーできるようズームインしますが、必要以上にズームインしないようにします。ナンバープレートが画像の端と平行になるように、カメラのロール角度を調整します。

カメラとカメラがキャプチャーする道路部分との間の距離は、撮影距離と呼ばれます。撮影距離は、ナンバープレートの検知可能性に複数の点で影響を与えるため、慎重に選択する必要があります。この章の残りの部分では、撮影距離の選択に影響を与えるさまざまなパラメーターについて説明します。
被写界深度
- 高さ
- キャプチャー距離または焦点距離
- 焦点面
- 被写界深度
鮮明で読み取り可能なナンバープレートをとらえるには、カメラのフォーカスをしっかりと合わせる必要があります。ただし、特定の1つの距離においてだけでなく、焦点面周辺の距離の範囲でも鮮明な画像を得ることができます。この範囲の大きさは被写界深度 (DOF) と呼ばれます。
絞りの開口部の大きさを小さくすることで、DOFを拡大することができます。Axisカメラでは、絞りの設定は現在の光源レベルに合わせて自動的に最適化され、通常は変更する必要はありません。絞りの開口部を小さくすると、カメラの低照度性能が制限されるため、慎重に行う必要があります。
検知可能範囲
- 高さ
- キャプチャー距離 (焦点距離)
- 垂直画角
検知可能範囲は、画像でナンバープレートの視認・読み取りが可能な、道路に沿った距離の範囲です。理想的な検知可能範囲は、カメラの視野全体ですが、常にこれが可能であるとは限りません。検知可能範囲は、カメラの被写界深度によって制限されることがあり、遠くにある車両は、イメージセンサーで確実に解像するには小さすぎる場合があります。
雪、雨、霧などの気象条件によって、長い撮影距離での視界が大幅に制限され、これにより検知可能範囲が制限される場合があります。
日中や良好な気象条件下では、撮影距離が長くなるにつれて検知可能範囲が増加します。高速で移動する車両の場合、車両が視野から出る前にナンバープレートを読み取るのに十分な時間を確保できるよう、長い撮影距離を使用する必要があります。
推奨撮影距離
| 車速 | 推奨最低撮影距離 |
|---|---|
| 10 km/h (~6 mph) | 4 m (~13 ft) |
| 30 km/h (~19 mph) | 7 m (~23 ft) |
| 50 km/h (~31 mph) | 11 m (~36 ft) |
| 80 km/h (~50 mph) | 24 m (~79 ft) |
| 100 km/h (~62 mph) | 27 m (~89 ft) |
| 130 km/h (~81 mph) | 30 m (~98 ft) |
推奨される最低撮影距離は、車両の速度によって異なります。表の数値は、0.2秒の推定検知時間に基づいています。これは、LPR分析ソフトウェアが1秒あたり5フレームを分析できることを意味します。1秒あたりに分析されるフレーム数は、LPRソフトウェアやプロセッサーによって異なる場合があり、画像の解像度によっても異なります。この表は単なる指標です。
夜間は、最大撮影距離がIR到達距離によって制限される場合が少なくありません。IR到達距離は、より強力な外部赤外線照明を使用することで、改善できます。
カメラの設定
ナンバープレートのキャプチャーにはカメラの設定が非常に重要です。専用のナンバープレートカメラのデフォルト設定は最適化されており、最小限の調整のみを必要とします。その他のカメラでは、設定変更が必要となる場合があります。
ナンバープレートキャプチャー用シーンプロファイル
一部のAxisカメラには、ナンバープレートキャプチャーと呼ばれるシーンプロファイルがあります。このプロファイルを有効にすると、カメラがLPR用に最適化され、Axisによって開発、テスト、検証された画像設定を使用します。この設定は各カメラモードに最適化されており、場合によっては、通常のユーザーパラメーターでは制御できないアルゴリズムの変更が含まれます。シーンプロファイルでは、次のようなことが可能です。
最大シャッターと最大ゲインを設定する
WDRをオフに設定するか、カメラの機種で利用可能であれば、モーションアーティファクトのないWDR技術に切り替える
LPRに適した形でトーンマッピングとコントラストを調整する
交通シナリオにより適したデイ/ナイト切り替え条件を使用する
交通カメラ設置アシスタントは、自動的に正しいシーンプロファイルを設定します。
カメラがシーンプロファイルをサポートしていない場合、またはナンバープレートキャプチャープロファイルが含まれていない場合は、一部の画像パラメーターを手動で変更する必要があります。最適な画像パラメーターはカメラの機種、設置条件、シーンによって異なるため、これは難しい場合があります。
最大シャッター時間
カメラのシャッター時間が長すぎると、画像内を移動している車両がモーションブラー (動きによる画像のブレ) を引き起こします。最大シャッター時間は、カメラの配置と車両の速度によって異なります。

カメラの正面から接近している車両は、画像内で横方向に移動せず、接近するにつれて大きくなります。この影響は、ほとんどの場合ごくわずかです。しかし、カメラと動きの方向の間に角度がある場合、車両は角度に応じた速度で画像内を横方向に移動します。横方向の速度は、約1/30秒の通常のシャッター時間でモーションブラーを引き起こすため、最大シャッター時間を制限する必要があります。
この表は、カメラと車両の進行方向との間の角度、および車両の速度に応じた推奨最大シャッター時間を示しています。カメラの角度は、カメラと車両の間の角度の表から見積もることができます。
| 車速: | |||||
|---|---|---|---|---|---|
| 30 km/h (~19 mph) | 50 km/h (~31 mph) | 80 km/h (~50 mph) | 110 km/h (~68 mph) | 130 km/h (~81 mph) | |
| カメラの角度 | |||||
| 5° | 19.3ミリ秒 | 11.6ミリ秒 | 7.2ミリ秒 | 5.3ミリ秒 | 4.5ミリ秒 |
| 10° | 9.7ミリ秒 | 5.8ミリ秒 | 3.6ミリ秒 | 2.6ミリ秒 | 2.2ミリ秒 |
| 15° | 6.5ミリ秒 | 3.9ミリ秒 | 2.4ミリ秒 | 1.8ミリ秒 | 1.5ミリ秒 |
| 20° | 4.9ミリ秒 | 2.9ミリ秒 | 1.8ミリ秒 | 1.3ミリ秒 | 1.1ミリ秒 |
| 25° | 4.0ミリ秒 | 2.4ミリ秒 | 1.5ミリ秒 | 1.1ミリ秒 | 0.9ミリ秒 |
| 30° | 3.4ミリ秒 | 2.0ミリ秒 | 1.3ミリ秒 | 0.9ミリ秒 | 0.8ミリ秒 |
シャッター時間が長いほどカメラはより多くの光を集め、その結果、赤外線の検出距離が長くなります。例えば、カメラを20°ではなく5°の角度で取り付けることで、シャッター時間が約4倍になり、赤外線の検出距離が2倍になります。Axisカメラのデータシートの赤外線検出距離は、カメラのデフォルトの最長シャッター時間に対して記載されています。
最大ゲイン
ナンバープレートは反射材でできているため、強い赤外線にさらされると明るく光ります。他の物体は、はるかに少ない光を反射するため、周囲は大幅に暗くなります。その結果、ナンバープレートが露出オーバーになり、読み取れなくなる可能性があります。
ナンバープレートの露出オーバーを防ぐ最も簡単な方法は、カメラの最大ゲインを制限することです。最適な最大ゲインは、利用可能なIR強度、車両までの距離、およびカメラの光感度によって異なります。Axisカメラの内蔵IRを使用した場合、9 dB~21 dBの範囲のどこかで妥当な結果が得られます。
WDR
ワイドダイナミックレンジ (WDR) は、画像のダイナミックレンジを拡大するためのさまざまな手法で構成されています。WDRは、他の方法では影に隠れてしまう詳細部分を引き出したり、強い光によってカメラが眩惑されたりするのを防ぐのに非常に役立ちます。
WDRは、特定のカメラでのWDRの実装方法によって、走行中の車両の画像にモーションアーティファクトを発生させる場合があります。カメラの仕様に別段の記載がない場合は、ナンバープレートをキャプチャーするために常にWDRをオフにしておくことをお勧めします。
ナンバープレート認識ソフトウェア
ナンバープレートのビデオストリームをキャプチャーした後、画像からナンバープレート番号を取り出すために特別な分析ソフトウェアが必要です。LPRシステムのパフォーマンスは、カメラの設定だけでなく、LPRソフトウェアの設定にも依存します。使用する特定のソフトウェアについては、マニュアルを参照してください。
LPRソフトウェアは、カメラで直接実行することも、リモートサーバーで実行することもできます。
リモートサーバーでLPRソフトウェアを実行する場合、大きな処理能力を提供できますが、離れた場所へのビデオストリーミングが必要になるため、より多くのネットワーク帯域幅が必要になります。大量のビデオストリームによって、すぐにネットワークが詰まるため、サーバーベースのシステムを多数のカメラに拡張することは困難です。
LPRソフトウェアをカメラで直接実行する場合は、ナンバープレートの文字と数字のみをカメラから中央サーバーに送信する必要があります (ただし、多くの場合、出力にはナンバープレートのスナップショットとコンテキスト表示も含まれます)。そのため、ネットワーク帯域幅の要件を最小限に抑えることができます。このような分散システムは、新しいカメラを追加する際にシステムに他のリソースを追加する必要がないため、容易に拡張できます。
カメラでLPRアルゴリズムを実行することの欠点は、処理能力が限られ、各画像の分析に時間がかかることです。使用可能な最大解像度が制限され、これにより各カメラでカバーできる車線数が制限されます。AIとニューラルネットワークを介した最新タイプの画像分析機能の開発により、カメラはますます強化されています。より効率的なアルゴリズムとより強力な内蔵プロセッサーにより、各画像の分析にかかる時間が短縮され、分散システムの競争力が高まります。
付録
光学フィルター
状況によっては、カメラの光路に光学フィルターを追加することで、画像を改善することができます。ただし、多くの場合、光学フィルターはかなりの量の光を遮断します。そのため、低照度性能が低下し、画像により多くのノイズが発生します。
偏光 (PL) フィルター
正しく位置合わせされた偏光フィルターは、車両のフロントガラスや路面などの平らな表面からの反射を抑えることができます。ただし、すべての光の50%がカメラに入らないよう遮断されるため、画質に大きな影響を与える可能性があります。ナンバープレートの視認性の向上は非常に限られています。そのため、LPCに偏光フィルターを使用することは推奨されません。ただし、車内の視認性の向上など、一般的な交通監視には役立つことがあります。
IRパスフィルター
IRパスフィルターは可視光を遮断し、赤外線のみがセンサーに到達できるようにします。ナンバープレートは周辺の物体よりもはるかに多くの赤外線を反射するため、画像は暗くなり、ナンバープレートだけが明るく光ります。これにより、LPRアルゴリズムがナンバープレートを見つけやすくなります。また、夜間にフォーカスが合いやすくなることもあります。
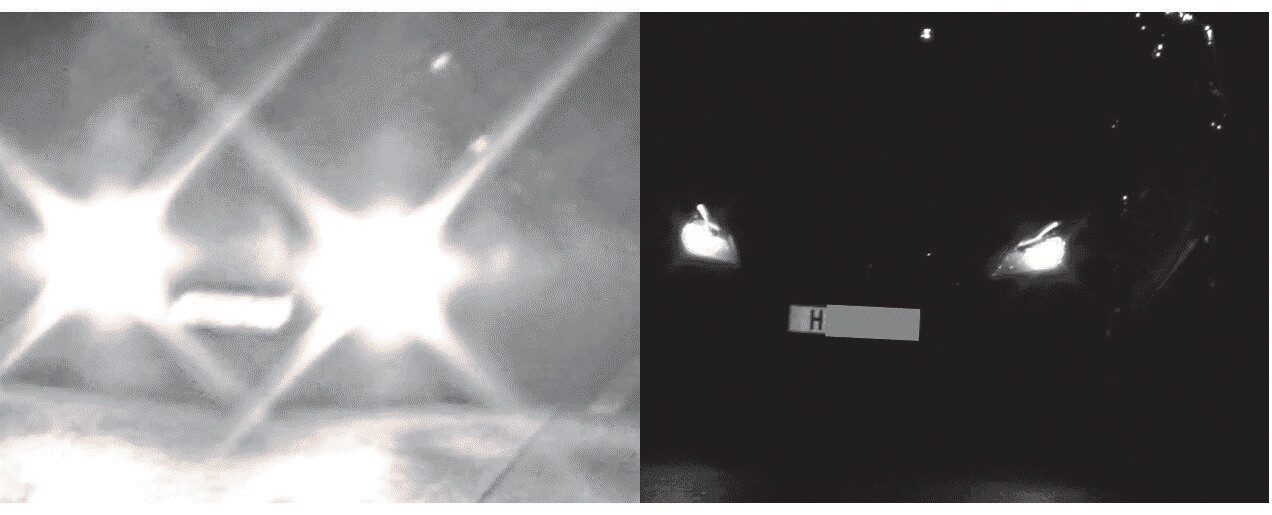
フィルターは、車のヘッドライトからの光を遮断することでレンズのグレアや反射を防ぐことができます。LEDヘッドライトの光は、この方法で非常に効率的にフィルタリングされます。一方、ハロゲンヘッドライトは、多くの赤外線波長域の光を放射し、この光は効率的にフィルタリングされません。
- 左: LEDヘッドライトからの光がIRパスフィルターによって遮断され、レンズグレアや迷光を効率的に低減しています。
- 右: ハロゲンヘッドライトからの光がIRパスフィルターを通過し、レンズグレアを引き起こしています。
ナイトモードのIRパスフィルター (IRカットフィルターOFF) は、検知率と精度を向上させることができます。赤外線照明がオフになっているときは、取り除く必要があります (デイモードでは、IRカットフィルターがONになります)。
カメラと車両の間の角度
カメラと車両の進行方向との間の合計角度は、次の式で計算することができます。
カメラと道路の間の横断距離:
hはカメラの設置高さ (メートル)、drはカメラと車線中心間の距離 (メートル) を表します。
カメラと車両の間の角度:
dtはカメラと道路の間の横断距離 (メートル)、dcは撮影距離 (メートル) を表します。
- 設置高さ、h
- キャプチャー距離、dc
- カメラと進行方向の垂直方向の角度
- 道路の中心からの距離、dr
- カメラと進行方向の水平方向の角度
合計角度を30°未満に維持することを推奨します。次の表は、一般的な設置高さ、カメラと車線中心間の距離、および撮影距離に基づいて計算されたカメラと車両の間の角度を示しています。
| 撮影距離: | |||||
|---|---|---|---|---|---|
| 高さ | 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) |
| 1.5 m (~5 ft) | 17° | 8.5° | 4.3° | 2.9° | 1.7° |
| 3 m (~10 ft) | 31° | 17° | 8.5° | 5.7° | 3.4° |
| 5 m (~16 ft) | 45° | 27° | 14° | 9.5° | 5.7° |
| 7 m (~23 ft) | 54° | 35° | 19° | 13° | 8.0° |
| 10 m (~33 ft) | 63° | 45° | 27° | 18° | 11° |
| 撮影距離: | |||||
|---|---|---|---|---|---|
| 高さ | 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) |
| 1.5 m (~5 ft) | 27° | 14° | 7.1° | 4.8° | 2.9° |
| 3 m (~10 ft) | 36° | 20° | 10° | 6.9° | 4.1° |
| 5 m (~16 ft) | 47° | 28° | 15° | 10° | 6.1° |
| 7 m (~23 ft) | 56° | 36° | 20° | 14° | 8.3° |
| 10 m (~33 ft) | 64° | 46° | 27° | 19° | 12° |
| 撮影距離: | |||||
|---|---|---|---|---|---|
| 高さ | 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) |
| 1.5 m (~5 ft) | 46° | 28° | 15° | 9.9° | 6.0° |
| 3 m (~10 ft) | 49° | 30° | 16° | 11° | 6.7° |
| 5 m (~16 ft) | 55° | 35° | 19° | 13° | 8.0° |
| 7 m (~23 ft) | 60° | 41° | 23° | 16° | 9.8° |
| 10 m (~33 ft) | 66° | 48° | 29° | 20° | 13° |
| 撮影距離: | |||||
|---|---|---|---|---|---|
| 高さ | 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) |
| 1.5 m (~5 ft) | 55° | 36° | 20° | 13° | 8.1° |
| 3 m (~10 ft) | 57° | 37° | 21° | 14° | 8.7° |
| 5 m (~16 ft) | 60° | 41° | 23° | 16° | 9.8° |
| 7 m (~23 ft) | 63° | 45° | 26° | 18° | 11° |
| 10 m (~33 ft) | 68° | 51° | 31° | 22° | 14° |