Piloto automático em câmeras panorâmicas selecionadas
Resumo
O piloto automático é um recurso que fornece videomonitoramento ativo em uma câmera multidirecional, utilizada em conjunto com uma câmera PTZ. Um objeto de interesse em movimento pode ser detectado em qualquer direção através das cabeças fixas da câmera multidirecional; então, a câmera PTZ é redirecionada automaticamente para aplicar zoom e rastrear o objeto.
Essa combinação de detecção de objetos em 360° e comandos PTZ fornece visão geral e exibições detalhadas de quaisquer incidentes.
O piloto automático está incluído no AXIS Object Analytics na AXIS Q6300-E Panoramic Camera e na AXIS Q6020-E Panoramic Camera. Você pode usar o piloto automático se estiver utilizando uma das seguintes combinações:
AXIS Q6300-E Panoramic Camera com uma câmera PTZ da série AXIS Q61/Q63/P56 PTZ Camera Series
AXIS Q6020-E Panoramic Camera com uma câmera PTZ da série AXIS Q60 PTZ Camera Series
Ao automatizar o controle PTZ, o piloto automático reduz a carga de trabalho do operador e permite alternar rapidamente entre monitoramento geral e uma observação detalhada. Isso melhora o reconhecimento da situação e aprimora os casos de uso, como reconhecimento ou identificação de pessoas e placas de licença.
Introdução
O piloto automático fornece videomonitoramento ativo na AXIS Q6300-E Panoramic Camera e na AXIS Q6020-E Panoramic Camera, direcionando uma câmera PTZ compatível conectada para objetos em movimento detectados pela câmera panorâmica.
Nos casos em que é necessário o reconhecimento ou a identificação de objetos — como verificar a identidade de uma pessoa ou ler a placa de licença de um veículo —, a câmera panorâmica pode não fornecer detalhes suficientes. Nesses casos, o piloto automático garante que a câmera PTZ forneça automaticamente uma visão mais aproximada e rastreie o objeto.
Este white paper descreve como funciona o recurso de piloto automático, suas configurações, regras de ação e limitações.
Combinando detecção de objetos em 360° com rastreamento PTZ automático
A AXIS Q6300-E Panoramic Camera e a AXIS Q6020-E Panoramic Camera são câmeras multidirecionais com quatro cabeças de câmera cada. Elas oferecem uma visão geral de 360° com detecção de objetos. No entanto, essas câmeras também foram especialmente projetadas para operação combinada com câmeras das séries AXIS Q61/Q63/P56 PTZ Camera Series e AXIS Q60 PTZ Camera Series, respectivamente. Com essa combinação, é possível capturar uma visão geral de alta resolução e exibições detalhadas de quaisquer incidentes, em uma solução de câmera completa.
O recurso de piloto automático viabiliza o rastreamento PTZ automático. Ele monitora uma área de interesse a partir da câmera multidirecional e utiliza a câmera PTZ para rastrear pessoas, veículos ou outros objetos de interesse em movimento.
Os objetos de interesse podem ser categorizados, e determinados tipos de objetos podem ser excluídos. Áreas ou direções específicas podem receber prioridade mais alta. O Piloto automático também pode disparar ações, como alertar a equipe de segurança, iniciar gravações de vídeo ou reproduzir clipes de áudio pelos alto-falantes.
Configurando o piloto automático
O piloto automático está incluído no AXIS Object Analytics. Você tem acesso ao piloto automático na interface Web da câmera panorâmica em Analytics > AXIS Object Analytics > Autopilot (Analíticos > AXIS Object Analytics > Piloto automático). Para obter mais informações sobre o AXIS Object Analytics, consulte o manual do usuário da câmera panorâmica.
Ativar o piloto automático criando um cenário
O piloto automático está desativado por padrão. Para ativá-lo, inicie o AXIS Object Analytics e crie pelo menos um cenário. Você tem duas opções para escolher:
Object in area – Autopilot (Objeto na área – Piloto automático). Este cenário recomendado baseia-se na detecção de objetos e permite categorizar objetos de interesse.
Motion in area – Autopilot (Movimento na área – Piloto automático). Baseado na detecção de movimento por vídeo, este cenário não é capaz de categorizar objetos.
Para garantir a cobertura completa da área visível, é necessário criar um cenário para cada um dos quatro sensores da câmera panorâmica.
Atribuir prioridade
É possível atribuir uma prioridade dentro de cada cenário. Quando objetos são detectados em um cenário com prioridade mais alta, como um portão ou outra área de interesse, o piloto automático os priorizará em relação a cenários com prioridade mais baixa.
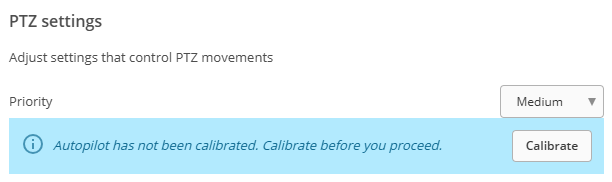
Calibrar o piloto automático
É necessário calibrar o piloto automático antes da primeira utilização. Você pode fazer isso facilmente dentro do cenário.
Ativar o piloto automático e atualizar as opções de rastreamento
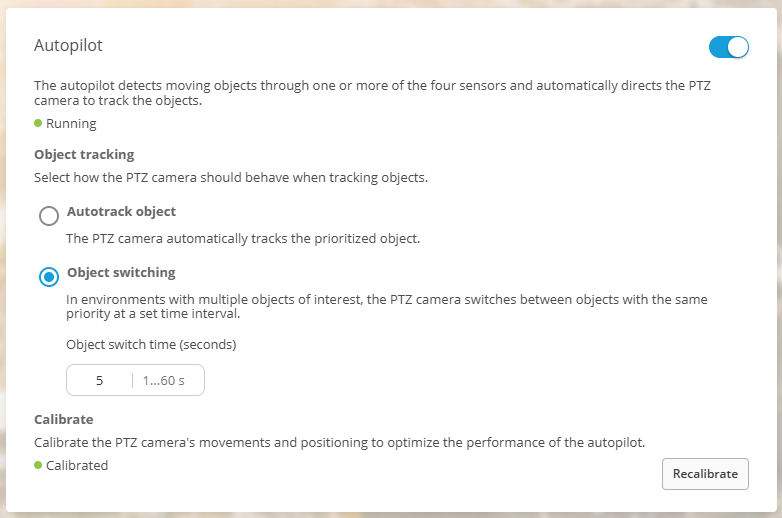
Em AXIS Object Analytics > Settings (Configurações), é possível:
ativar e desativar o piloto automático
configurar o comportamento de rastreamento da câmera PTZ caso vários objetos sejam detectados
ajustar o tempo de alternância entre objetos: o intervalo de tempo para que a câmera PTZ alterne entre os objetos.
Rastreamento de objetos
O piloto automático rastreia os objetos detectados, mapeando-os em um sistema de coordenadas com ângulos de pan/tilt. A cada objeto é atribuído três propriedades: pan, tilt e tamanho.
Os objetos que estão próximos o suficiente uns dos outros para caberem no campo de visão da câmera PTZ são agrupados. A cada grupo são atribuídas propriedades de pan, tilt e zoom, que são utilizadas quando a câmera PTZ está rastreando o grupo. O piloto automático continuará rastreando o mesmo grupo enquanto ele existir. Se a opção Object switching (Alternância entre objetos) estiver ativada, o piloto automático alternará para um novo objeto (se houver) assim que o tempo configurado em Object switch time (Tempo de alternância entre objetos) tiver decorrido.
Zoom
O piloto automático aplica zoom em objetos ou grupos de objetos detectados. Quando os objetos se movem, ou quando dois ou mais objetos se afastam uns dos outros, o piloto automático pode reduzir o zoom para evitar que eles saiam de quadro. O piloto automático também ajusta o zoom para manter os objetos em um tamanho adequado em relação ao tamanho total da imagem.
Regras de ação
É possível utilizar o piloto automático para disparar várias ações. Quando o piloto automático inicia ou interrompe o rastreamento de um objeto, ele gera o evento Autopilot tracking (Rastreamento do piloto automático). Este evento pode ser utilizado como um acionador para:
iniciar uma gravação
criar um marcador
gerar uma entrada de registro em um VMS.
Essas integrações garantem que eventos importantes sejam documentados e estejam facilmente acessíveis para análise posterior.
Também é possível utilizar regras de ação para ativar o piloto automático. Por exemplo, uma programação poderia ativar a ação Turn on autopilot (Ativar piloto automático) fora do horário de funcionamento, quando se espera que uma área supervisionada esteja vazia.
Detecção de áudio direcional
O piloto automático funciona em conjunto com a detecção de áudio direcional, que possui prioridade mais alta. Caso o recurso de detecção de áudio direcional detecte um som enquanto o piloto automático estiver rastreando um objeto, o piloto automático será pausado e a câmera PTZ será redirecionada para o som detectado. Após o redirecionamento, o piloto automático será retomado a partir da nova posição e rastreará o objeto que produziu o som, caso esse objeto esteja visível.
Compatibilidade
O piloto automático é suportado por todas as câmeras PTZ compatíveis com a AXIS Q6300-E Panoramic Camera ou com a AXIS Q6020-E Panoramic Camera.
Limitações
Como ocorre com todos os detectores, há circunstâncias em que o piloto automático apresenta um desempenho insatisfatório. Compreender as limitações pode ajudar a definir as expectativas para que você possa desenhar seu sistema de acordo com elas.
Existem algumas limitações conhecidas:
Falsas detecções. O piloto automático depende da detecção de objetos por vídeo ou da detecção de movimento por vídeo, que podem ser afetadas por condições de iluminação inadequadas, sombras ou elementos que apresentam movimento, como bandeiras, árvores e outros tipos de vegetação. Isso pode gerar detecções falsas, levando o piloto automático a rastrear objetos que não existem.
Objetos que se movem rapidamente. Objetos muito rápidos podem ser difíceis de rastrear de forma precisa.
Alta densidade de objetos. Uma cena com um grande número de objetos detectados em movimento pode ser desafiadora. O piloto automático não inclui nenhuma função integrada para exibição sequencial de todos os objetos detectados.
O tamanho mínimo do objeto nas exibições da câmera panorâmica também afeta o desempenho do piloto automático. Este tamanho é definido pelo AXIS Object Analytics. Recomendamos pelo menos 8% da altura total da imagem para pessoas e 6% para veículos, a fim de garantir que o piloto automático possa rastreá-los. No outro extremo da escala, objetos maiores que 35° na horizontal ou 25° na vertical são ignorados.