牌照捕捉
概述
牌照捕捉 (LPC) 是指摄像机能够捕捉牌照的可读图像。它被应用于牌照识别 (LPR) 系统。在这些系统中,牌照被分析软件自动侦测和读取,适合出入控制、停车管理或高速公路自动收费放行等应用场合。
LPR系统的侦测率和准确度取决于所捕捉的图像的质量。专用型LPC摄像机拥有可优化牌照捕捉的默认设置,尽可能减少了对重新配置的需求。出于这些原因,从噪声过滤、增益处理,到自动对焦、日夜转换,众多功能全都经过了重新评估,并在真实的室外交通场景中接受了测试。LPC所需的摄像机设置不同于大多数其他应用场合,因此使用专用型LPC摄像机有助于节省大量时间和精力。
高分辨率是图像质量的重要组成部分之一。对于牌照捕捉,分辨率应足够高,方能解析字母和数字——在图像中要解析的最小结构元素上,至少需要覆盖两个像素,但这个分辨率又不应过高,否则图像数据量过于庞大,会降低软件分析速度。尤其是当LPR软件直接在摄像机上运行时,分辨率通常不应高于200万像素。
如果不使用专用型LPC摄像机,则需要特别注意照明、安装和摄像机设置。下面是一些重要建议:
在夜间使用人工红外照明。这种光对人眼不可见,不会晃到驾驶员的眼睛。
如果使用外置光源,请将其安放在尽可能靠近摄像机的地方。原因在于,牌照会将光直接反射回来。安讯士LPC摄像机随附有经优化的集成式红外照明。
尽可能减小摄像机与汽车行进方向之间的夹角,这样就能够更好地查看迎面的牌照。建议总角度小于30°。
摄像机的安置应确保它能够在适合预期车速的距离处捕捉牌照。速度越快,需要的捕捉距离越长,否则在汽车离开摄像机视野之前,系统便没有足够的时间来读取牌照。您还必须考虑摄像机景深和红外距离所带来的限制。
限制最大快门时间,以免产生运动模糊。推荐的最大快门时间取决于摄像机对准和车辆速度。
限制摄像机的最大增益,以免在夜间牌照过度曝光。
引言
牌照捕捉 (LPC) 是指摄像机能够捕捉可读牌照的图像。它是牌照识别 (LPR) 的前提,在牌照识别中,由分析软件自动查找并读取牌照。
LPR系统的侦测率和准确度在很大程度上取决于所捕捉的图像的质量。作为识别链中的第一道环节,LPC摄像机应在昼夜不停且不受天气条件影响的情况下,以非常高的清晰度和对比度提供牌照图像。
本白皮书介绍了牌照捕捉的关键组成部分,涉及硬件选择、安装和配置。第3节介绍了安讯士专用型LPC摄像机,这些摄像机能够提供卓越图像质量,且安装设置简单。第5、6和7节详细介绍了使用安讯士摄像机对牌照成像的必要步骤。
背景
牌照识别 (LPR) 有着广泛的应用,其中包括出入控制、停车管理、高速公路自动收费放行等。
自20世纪70年代以来,LPR一直有着特定的形式,但直到最近,才演变成昂贵的大型系统。随着网络摄像机的飞速发展,LPR系统的价格逐渐降低,灵活性越来越高,因此应用领域也越来越广泛。
与牌照识别相似的系统有着众多的名称和缩略词,如:自动牌照识别 (ALPR)、自动车牌号识别 (ANPR)、自动车辆识别 (AVI)、车辆牌照识别 (VLPR)、车辆识别标识符 (VRI)、汽车车牌识别 (CPR)、汽车车牌读取器 (CPR) 等。
- 牌照捕捉
- 软件算法
- 数据库或响应
LPR系统由一台或多台捕捉牌照图像(牌照捕捉)的摄像机组成。图像由直接在摄像机上运行或者在远程服务器上运行的牌照分析软件进行处理。LPR软件自动查找并实时读取牌照。检测到的车牌号码可以存储在数据库中以供将来使用,也可以用于触发特定操作,比如打开大门。
理想的情况是,LPR系统应找到并正确读取所有经过车辆的牌照。摄像机提供的图像质量对于高侦测率和高准确度有着重要影响。没有哪种算法(无论它多么先进)能够从不清晰的牌照图像中读取牌照。
为了成功侦测到牌照,摄像机需要以适当的方式定位和对准。此外,LPC所需的摄像机设置也不同于大多数其他应用场合。通用型摄像机的默认设置不适合LPC,因此需要重新配置摄像机。所有这些都让安装变得相当繁琐,而这只有通过专用型LPC/LPR摄像机来解决。
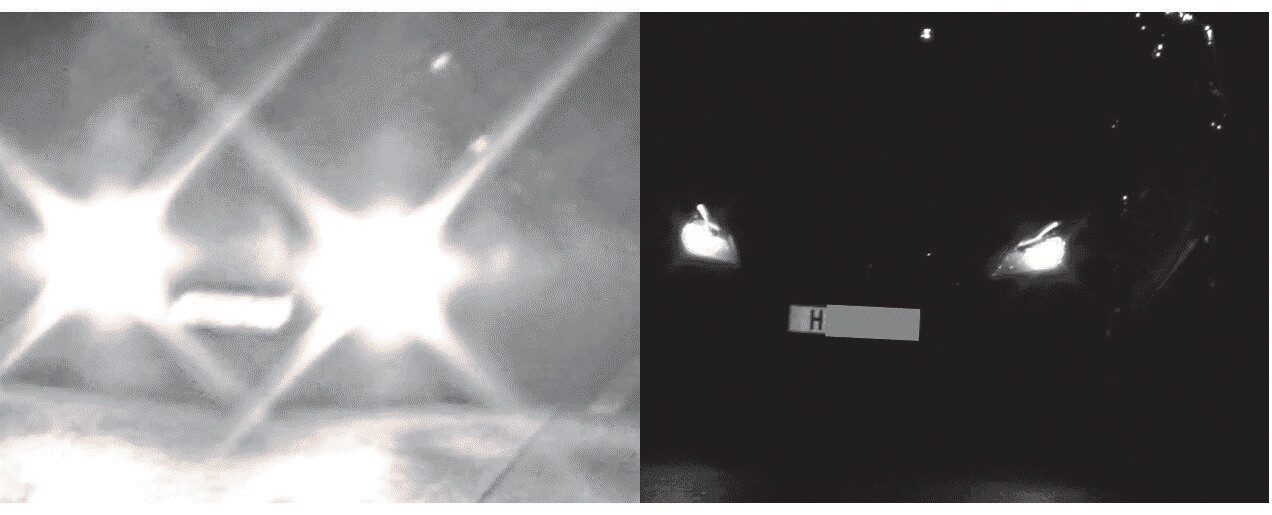
- 左图:使用配置不当的摄像机
- 右图:使用安讯士专用型LPC/LPR摄像机
安讯士LPC/LPR摄像机
安讯士的专用型LPC/LPR摄像机旨在满足交通设施的严苛应用条件。部件经过精心选择,能够耐受恶劣天气、强风和温度变化。内置红外光源的强度和方向性特别强,可在夜间提供高对比度的牌照图像。
在安讯士LPC/LPR摄像机中,图像优化不仅限于快门时间和增益设置。对于这些摄像机,基础图像处理部件专门针对LPC进行了重新配置。从噪声过滤、增益处理,到自动对焦、日夜转换,众多功能全都经过了重新评估,并在真实的室外交通场景中接受了测试。
安讯士LPC/LPR摄像机的默认设置能够优化牌照捕捉,因此您只需进行很少的配置即可开始使用。
交通摄像机安装助手
交通摄像机安装助手是一款由安讯士开发的工具,帮助您正确对准和配置摄像机。
对准摄像机时,交通摄像机安装助手将自动为您提供反馈。这要得益于摄像机能够测量其在重力场中的朝向。安装助手连续显示摄像机垂直角、摄像机水平角以及侧倾角,如果这些角度过大,便会显示相关警告。它还能够实时计算捕捉距离,这个参数非常重要,难以通过肉眼估算。
对准完成后,摄像机会根据具体的场景和摄像机型号计算合适的摄像机设置。单击Apply settings(应用设置),即可激活配置,并优化摄像机以捕捉牌照。
像素密度
为了确保读取车牌号,牌照在图像传感器上的成像像素应足够多,以便解析各字母和数字。为了获得黑色字体与白色背景之间的较大对比度,在图像中要解析的最小结构元素上,至少需要覆盖两个像素。对于标准欧洲牌照,这就意味着,如要解析各线条,在车牌的整个宽度上需要74个像素。这只是清楚解析车牌号的基本需求,大多数LPR软件要求在车牌的整个宽度上有大约100-150个像素。
分辨率较高的缺点在于,LPR软件分析每个图像所需的时间较长。这就增大了在车流密集时遗漏某些车牌的风险。直接在摄像机上运行LPR软件时,建议所使用的分辨率不超过200万像素。可以考虑使用多台摄像机来覆盖更多车道。另外,还需要核对LPR软件手册中所提供的推荐分辨率。
| 最低分辨率 | |
|---|---|
| 1条车道,宽度 < 4 m (~13 ft) | 100万像素(高清,720p) |
| 2条车道,宽度 < 8 m (~25 ft) | 200万像素(全高清,1080p) |
从摄像机角度讲,牌照所覆盖的像素数量取决于图像传感器的分辨率和摄像机视野。
变焦镜头支持放大和缩小,因此能够针对具体场景自由选择相应的视野。

- 左图:摄像机放大景物并显示单条车道(4米宽)。牌照覆盖250个像素。
- 右图:摄像机缩小景物并几乎覆盖两条车道(6.5米宽)。牌照覆盖154个像素。
| 捕捉距离: | |||||
|---|---|---|---|---|---|
| 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) | |
| 1条车道 < 4 m (~13 ft) | 33°–44° | 17°–23° | 9°–11° | 6°–8° | 3°–6° |
| 2条车道 < 8 m (~25 ft) | 62°–77° | 33°–44° | 17°–23° | 11°–15° | 7°–9° |
红外光
夜间的牌照捕捉需要人工照明。通常使用的是红外光,这种光对人眼不可见,不会晃到驾驶员的眼睛。大多数牌照都能够反射红外光,因此红外光能够提升牌照在黑暗或阴天环境下的可见度和对比度。红外光可以来自摄像机内置的LED,也可以来自外置红外光源。
红外距离
光强度随着与光源相距的距离(的平方)增大而减小。对于牌照这样的反光物体,事实上,光源与物体之间的距离每翻一倍,就要求红外功率增大四倍,以便获得同等的物体可视度。
特定安装方式的最长可能捕捉距离取决于可用的红外功率、红外光入射角度以及摄像机对红外光的敏感度。Axis OptimizedIR技术能够针对每个变焦级别优化摄像机集成式 LED 的红外光入射角度。Axis Lightfinder能够尽可能增大内置红外LED的工作距离,降低对外置红外光源和附加电源的需求。
由于LPC所需的快门时间较短,因此相比默认设置,摄像机收集到的光量较少。然而,牌照较高的红外光反射率将提高牌照的亮度。总的来说,将摄像机用于LPC用途(快门时间为1/500 s)时,红外距离将相比指定值减少大约50%。这不适用于专用型LPC摄像机,因为这些摄像机的默认曝光时间短,并且因具体应用而异。
对于通用型安讯士摄像机,数据表中列出的红外距离适用于摄像机的默认设置(快门时间通常不超过1/30 s)和非反光物体。对于安讯士LPC摄像机,数据表中列出的红外距离适用于摄像机的LPC默认设置(快门时间通常不超过1/500 s)和反光牌照。
外置红外光源
如果内置LED无法满足红外照明范围,或者如果摄像机未配备内置红外LED,则可以使用摄像机外置红外光源。红外光源的光锥应以相关的变焦级别匹配摄像机视野。
牌照由回归反射材料制成,这就意味着,无论光以何种角度投射到车牌,都会直接被反射回来。使用外置红外光源时,反射的红外光将朝着光源反射。
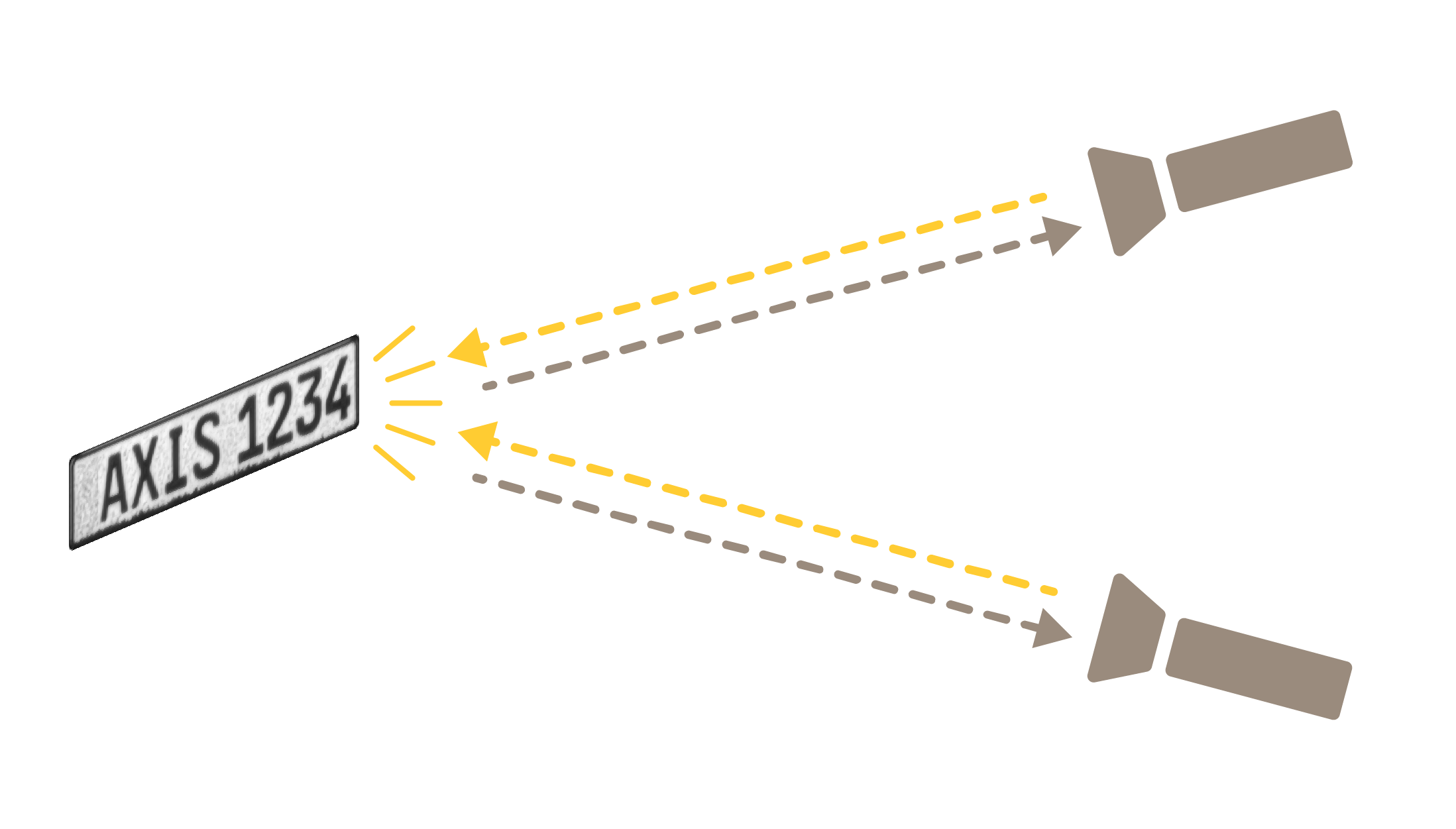
出于这个原因,外置红外光源需要靠近摄像机放置,以免反射光能够实际投射到摄像机上。摄像机拍摄的牌照图像的亮度和对比度随着红外光源远离摄像机而急剧降低。
红外光源应平行于摄像机,从而确保红外光投射到位于摄像机视野范围内的道路部分。
安装
摄像机安装通常是一个关键环节,因为一经安装,后期便难以改动。着手安装摄像机之前,应花时间权衡相关事宜。
安讯士交通摄像机安装助手是一项专为特定交通场景辅助安装、对准和微调而开发的工具。它能够实时显示相关角度和距离,为您提供指导,在摄像机对准不佳的情况下,还能够发出警告。
摄像机位置
- 安装高度
- 捕捉距离
- 摄像机与行进方向的垂直夹角
- 与道路中心的距离
- 摄像机与行进方向的水平夹角
应尽可能减小摄像机与汽车行进方向之间的夹角,以便更好地查看或多或少地位于正面的牌照。理想情况下,摄像机应位于车辆的正上方,不要过高。建议摄像机位置高于汽车前大灯,以免摄像机受到车灯的强光影响。
此外,还应避免将摄像机放置在路灯等其他强光源附近。否则可能影响摄像机的自动曝光功能,导致光学元件产生眩光和反射。
请参阅摄像机与汽车之间的夹角部分中的表格,其中针对常用的安装高度、道路距离和捕捉距离,给出了摄像机与汽车之间的夹角的计算值。
摄像机对准
摄像机应朝向道路,确保相关车道位于图像中心。它应支持变焦,以便覆盖所需但不过多的车道数。应调整摄像机的侧倾角,确保牌照平行于图像边缘。

摄像机与其所拍摄的道路部分之间的距离被称为捕捉距离。应谨慎选择捕捉距离,因为它会以多种方式影响牌照侦测能力。在本章的其余部分,我们将讨论影响捕捉距离选择的不同参数。
景深
- 高度
- 捕捉距离或焦距
- 焦平面
- 景深
要清晰地读取牌照,摄像机需要合理对焦。但图像不仅在某个特定的距离处是清晰的,而且在焦平面周围的一定距离范围内,也都是清晰的。这个范围的大小被称为景深 (DOF)。
您可以通过缩小光圈来增大景深。在安讯士摄像机中,光圈设置会针对当前照度等级自动优化,通常无需更改。光圈的减小应谨慎执行,因为它会限制摄像机在低光条件下的性能。
可侦测范围
- 高度
- 捕捉距离(焦距)
- 垂直视角
可侦测范围是沿道路方向能够在图像中看到并读取牌照的距离范围。理想的情况是,可侦测范围是摄像机的全视野,但这并不是都能够实现的。可侦测范围可能受限于摄像机的景深,远处的车辆图像有时太小,无法被图像传感器很好地解析。
在捕捉距离较远时,雪、雨、雾等天气条件会严重限制可见度,进而限制可侦测范围。
在白天和天气良好的情况下,可侦测范围增大,捕捉距离也更远。对于高速行驶的车辆,需要使用长捕捉距离,以便在汽车离开摄像机视野之前,有足够的时间来读取牌照。
推荐的捕捉距离
| 汽车速度 | 推荐的最小捕捉距离 |
|---|---|
| 10 km/h (~6 mph) | 4 m (~13 ft) |
| 30 km/h (~19 mph) | 7 m (~23 ft) |
| 50 km/h (~31 mph) | 11 m (~36 ft) |
| 80 km/h (~50 mph) | 24 m (~79 ft) |
| 100 km/h (~62 mph) | 27 m (~89 ft) |
| 130 km/h (~81 mph) | 30 m (~98 ft) |
推荐的最小捕捉距离取决于车辆的速度。表中的数据基于0.2 s的估计侦测时间,这就意味着,LPR分析软件每秒可分析5帧。请注意,每秒的分析帧数可能因不同的LPR软件和不同的处理器而异,而且还取决于图像分辨率。表中数据仅供参考。
在夜间,最大可能捕捉距离通常受限于红外距离。可以利用更强大的外置红外光源来改善红外距离。
摄像机设置
拍摄牌照时,摄像机设置非常重要。专用型牌照捕捉摄像机在交货时已拥有合适的默认设置,只需非常少的调节。对于其他摄像机,您可能需要更改一些设置。
用于牌照捕捉的场景配置文件
某些安讯士摄像机有一个名为牌照捕捉的场景配置文件。激活此配置文件后,摄像机将使用针对LPR优化的图像设置,这些设置已由安讯士开发、测试和验证。针对每种摄像机模式优化具体设置,有时包括对无法通过普通用户参数来控制的算法所做的更改。例如,场景配置文件可以:
设置最大快门时间和最大增益
设置WDR关闭或切换到无运动伪影的WDR技术(摄像机型号适用)
以适合LPR的方式调整色调映射和对比度
使用更适合交通场景的日夜切换条件。
交通摄像机安装助手会自动设置正确的场景配置文件。
如果您的摄像机不支持场景配置文件或不包含牌照捕捉配置文件,则需要手动更改一些图像参数。这有一定的操作难度,因为理想的图像参数取决于摄像机型号、安装条件和场景。
最大快门时间
如果摄像机的快门时间过长,图像中的行驶车辆将产生运动模糊。最大快门时间取决于摄像机对准和车辆速度。

迎面驶近摄像机的汽车不会在图像中横向运动,而是随着距离靠近,图像变得越来越大。这种效果通常可忽略。但如果摄像机与运动方向之间存在夹角,汽车便会以取决于这个角度的速度,在图像中横向运动。在大约1/30 s的正常快门时间下,横向运行速度会导致产生运动模糊,因此需要限制最大快门时间。
下表显示了根据摄像机与汽车行进方向之间的夹角以及车辆速度推荐的最大快门时间。摄像机角度可以通过摄像机与汽车之间的夹角中的表格进行估算。
| 汽车速度: | |||||
|---|---|---|---|---|---|
| 30 km/h (~19 mph) | 50 km/h (~31 mph) | 80 km/h (~50 mph) | 110 km/h (~68 mph) | 130 km/h (~81 mph) | |
| 摄像机角度 | |||||
| 5° | 19.3 ms | 11.6 ms | 7.2 ms | 5.3 ms | 4.5 ms |
| 10° | 9.7 ms | 5.8 ms | 3.6 ms | 2.6 ms | 2.2 ms |
| 15° | 6.5 ms | 3.9 ms | 2.4 ms | 1.8 ms | 1.5 ms |
| 20° | 4.9 ms | 2.9 ms | 1.8 ms | 1.3 ms | 1.1 ms |
| 25° | 4.0 ms | 2.4 ms | 1.5 ms | 1.1 ms | 0.9 ms |
| 30° | 3.4 ms | 2.0 ms | 1.3 ms | 0.9 ms | 0.8 ms |
请注意,快门时间较长时,摄像机获得的光将更多,这将增大红外光覆盖范围。如果将相机以5°而不是20°的角度安装,快门时间大约可以增加四倍。这将使红外光覆盖范围扩大一倍。安讯士摄像机数据表中的红外光覆盖范围是针对摄像机的默认最大快门时间给出的。
最大增益
由于牌照由反光材料制成,在受到高强度红外光照射时,牌照图像会呈高亮显示。周围物体将暗得多,因为它们反射的光要少得多。这可能导致,牌照曝光过度,无法被读取。
避免牌照曝光过度的较简单的办法是,限制摄像机的最大增益。理想的最大增益取决于可用的红外光强度、与车辆相距的距离以及摄像机的感光度。在使用安讯士摄像机的内置红外光时,9 dB至21 dB范围内的最大增益设置能够得到较不错的结果。
WDR
宽动态范围 (WDR) 涉及图像动态范围的不同增强技术。WDR非常适合用于突显原本会被阴影遮挡的细节,或者防止摄像机受到强光影响。
WDR可能导致行驶车辆的图像中产生运动伪影,这具体取决于WDR在特定摄像机中的实现方式。如果摄像机规格没有相关要求,建议在捕捉牌照时,始终关闭WDR功能。
牌照识别软件
捕捉到牌照的视频流之后,需要使用专门的分析软件从图像中提取车牌号码。LPR系统的性能不仅取决于摄像机设置,而且还取决于LPR软件的配置。请参阅所用软件的说明手册。
LPR软件可以直接在摄像机上运行,也可以在远程服务器上运行。
在远程服务器上运行LPR软件能够提供强大的处理能力,但需要将视频流传送到较远的地方,这就需要占用较多的网络带宽。由于大量的视频流可能快速造成网络拥堵,因此在基于服务器的系统中,难以大幅扩展摄像机数量。
直接在摄像机上运行LPR软件意味着,只需要将牌照字母和数字从摄像机传送到中央服务器(但输出数据中通常也包含牌照快照和情景信息)。这就大大降低了对网络带宽的要求。这样的分布式系统支持轻松扩展,因为在添加新摄像机时,无需再向系统中添加其他资源。
在摄像机上运行LPR算法的缺点在于,处理能力有限,这就使得每个图像的分析较为耗时。它会限制可使用的最大分辨率,这就限制了每台摄像机能够覆盖的车道数。得益于通过AI和神经网络技术助力开发新型图像分析工具,摄像机的能力逐渐提升。更高效的算法以及更强大的嵌入式处理器,将缩减每个图像的分析时间,提升分布式系统的竞争力。
附录
滤光片
在摄像机光路中增设滤光片,可以改善某些情形下的图像呈现。不过,它们往往会阻挡大量光线。这会降低弱光下的性能表现,并在图像中引入更多噪声。
偏振滤光片
正确对准的偏振滤光片可以降低平坦表面(比如,汽车挡风玻璃或路面)的反射。但它会阻挡其中50%的光线进入摄像机,而这会对图像质量造成相当大的影响。牌照可见度的提高非常有限。为此,我们建议不要将偏振滤光片用于LPC用途。但它适用于一般交通监控,例如:可改善车辆内部的可见度。
红外带通滤光片
红外带通滤光片能够拦截可见光,仅允许红外光到达传感器。由于相比周围物体,牌照反射的红外光要多得多,因此图像将较暗,只有牌照高亮显示,这可能有助于LPR算法识别牌照。它也可以改善夜间对焦。
滤光片可以阻挡汽车前大灯的光线,防止镜头产生眩光和反光。这样就能够非常高效地滤除来自LED车灯的灯光。但卤素灯发出的光有许多都在红外波长范围内,因此这种光无法被高效滤除。
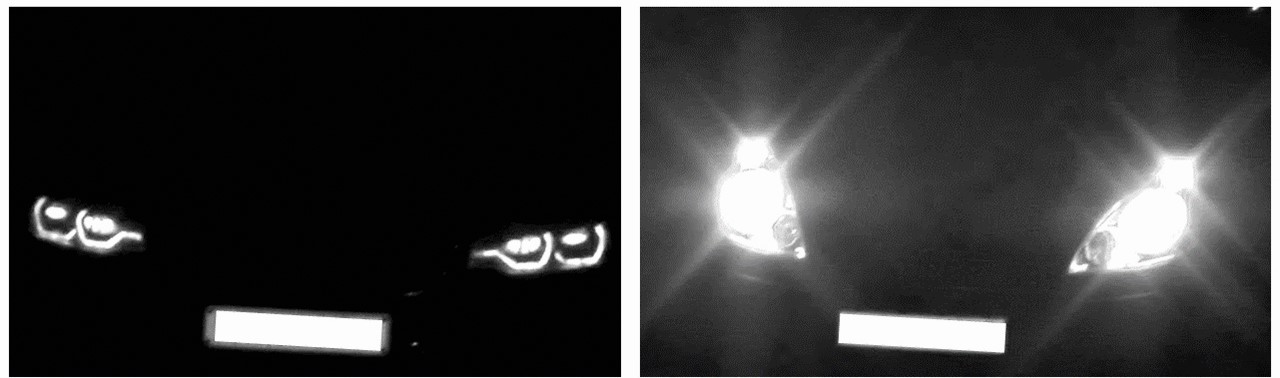
- 左图:来自LED车灯的灯光被红外带通滤光片拦截,从而高效降低了镜头眩光和杂散光。
- 右图:来自卤素车灯的灯光通过红外带通滤光片,引起镜头眩光。
夜间模式(红外截止滤光功能关闭)的红外带通滤光片能够改善侦测率和准确度。在红外光源关闭的情况下,需要移除此装置(在日间模式下,红外截止滤光功能开启)。
摄像机与汽车之间的夹角
摄像机与汽车行进方向之间的夹角的总角度可以通过以下公式计算得到。
摄像机与道路之间的横向距离:
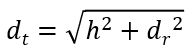
其中,h是摄像机安装高度(单位:米),dr是道路距离(单位:米)。
摄像机与汽车之间的夹角:
其中,dt是摄像机与道路之间的横向距离(单位:米),dc是捕捉距离(单位:米)。
- 安装高度,h
- 捕捉距离,dc
- 摄像机与行进方向的垂直夹角
- 与道路中心的距离,dr
- 摄像机与行进方向的水平夹角
建议总角度保持在30°以下。在下面的表格中,针对某些常用的安装高度、道路距离和捕捉距离,计算摄像机与汽车之间的夹角。
| 捕捉距离: | |||||
|---|---|---|---|---|---|
| 高度 | 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) |
| 1.5 m (~5 ft) | 17° | 8.5° | 4.3° | 2.9° | 1.7° |
| 3 m (~10 ft) | 31° | 17° | 8.5° | 5.7° | 3.4° |
| 5 m (~16 ft) | 45° | 27° | 14° | 9.5° | 5.7° |
| 7 m (~23 ft) | 54° | 35° | 19° | 13° | 8.0° |
| 10 m (~33 ft) | 63° | 45° | 27° | 18° | 11° |
| 捕捉距离: | |||||
|---|---|---|---|---|---|
| 高度 | 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) |
| 1.5 m (~5 ft) | 27° | 14° | 7.1° | 4.8° | 2.9° |
| 3 m (~10 ft) | 36° | 20° | 10° | 6.9° | 4.1° |
| 5 m (~16 ft) | 47° | 28° | 15° | 10° | 6.1° |
| 7 m (~23 ft) | 56° | 36° | 20° | 14° | 8.3° |
| 10 m (~33 ft) | 64° | 46° | 27° | 19° | 12° |
| 捕捉距离: | |||||
|---|---|---|---|---|---|
| 高度 | 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) |
| 1.5 m (~5 ft) | 46° | 28° | 15° | 9.9° | 6.0° |
| 3 m (~10 ft) | 49° | 30° | 16° | 11° | 6.7° |
| 5 m (~16 ft) | 55° | 35° | 19° | 13° | 8.0° |
| 7 m (~23 ft) | 60° | 41° | 23° | 16° | 9.8° |
| 10 m (~33 ft) | 66° | 48° | 29° | 20° | 13° |
| 捕捉距离: | |||||
|---|---|---|---|---|---|
| 高度 | 5 m (~16 ft) | 10 m (~33 ft) | 20 m (~66 ft) | 30 m (~98 ft) | 50 m (~164 ft) |
| 1.5 m (~5 ft) | 55° | 36° | 20° | 13° | 8.1° |
| 3 m (~10 ft) | 57° | 37° | 21° | 14° | 8.7° |
| 5 m (~16 ft) | 60° | 41° | 23° | 16° | 9.8° |
| 7 m (~23 ft) | 63° | 45° | 26° | 18° | 11° |
| 10 m (~33 ft) | 68° | 51° | 31° | 22° | 14° |